

Showcase your capabilities
If you design, build or supply Inertial Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.


Find manufacturers and suppliers of inertial components that deliver the navigation, guidance, and stabilization capabilities required for modern defense operations. These inertial systems provide reliable performance in environments where GNSS/GPS signals are limited, compromised, or denied, ensuring mission continuity across a wide range of military platforms.
Read the Technology Overview

Advanced Inertial Navigation Systems (INS) for Reliable Navigation in Challenging Operational Environments

High-Precision Inertial Solutions for Robotics & Autonomous Systems Operating in GPS-Denied Environments

Advanced Solutions for Defense Modernization: Propulsion, Sensors, Communication & Augmented Reality Systems

Autonomous Military Robotics and Technologies | Amphibious Tracked Vehicles
Tactical Grade IMU, GPS/INS, Weapon Orientation Solutions

Assured Position, Navigation and Timing (PNT) Solutions for Military and Defense

Advanced Navigation Solutions for Mission-Critical Defense & Aerospace Applications

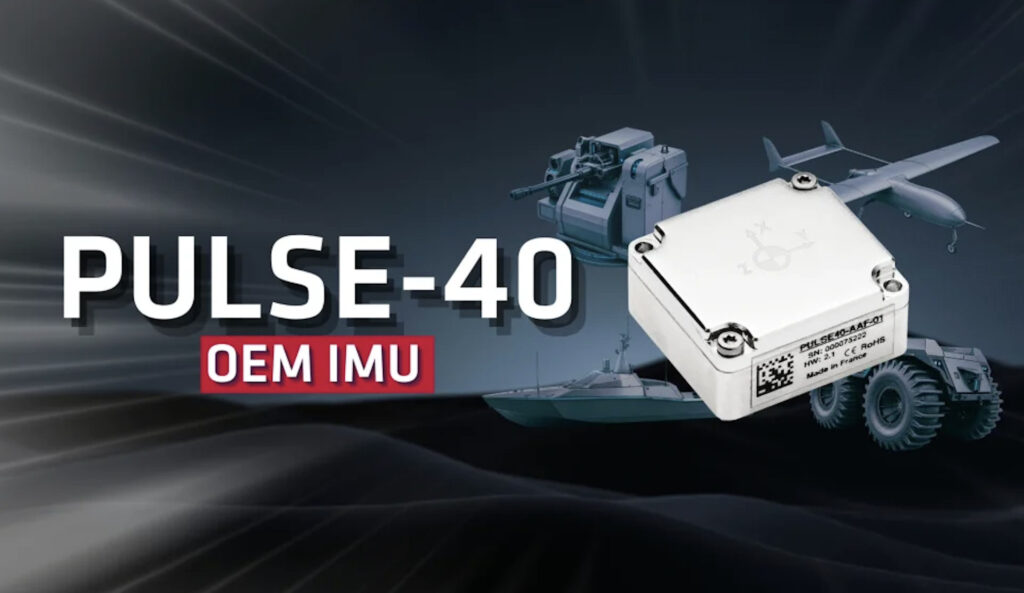
State-Of-The-Art Flight Control & GNSS-Denied Navigation Technologies for Tactical UAV Platforms

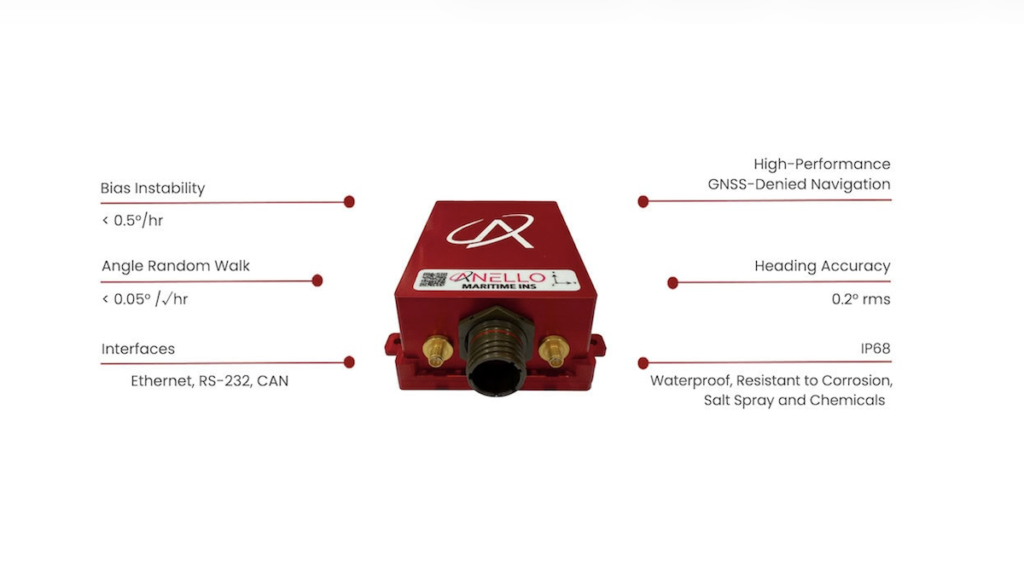
High-Precision MEMS, Quartz & FOG Inertial Sensing Systems for Military, Aerospace & Defense Applications

High-Performance Fiber Optic and MEMS Inertial Sensors & Navigation Systems

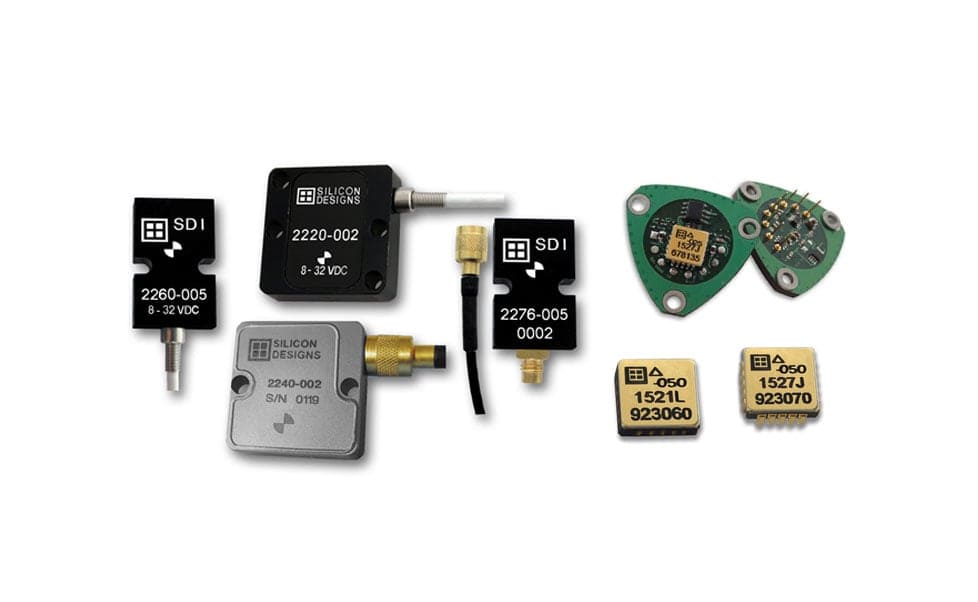
MEMS Inertial Sensors, Gyroscopes & Accelerometers for Inertial Guidance, Control & Stabilization

State-Of-The-Art NDAA-Compliant Electronic Hardware Components for Mission-Critical Drone & Robotics Platforms. Made in the USA.

Assured PNT Solutions for Mission Critical Military, Defense & Government Applications

High-Performance Inertial Sensing & Navigation Systems for Military Land Vehicles & Ground Forces

MEMS-based Inertial Navigation Systems for Supporting Tactical Unmanned Operations in GPS-Denied Environments
If you design, build or supply Inertial Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Inertial systems provide continuous orientation, position, and velocity data across air, land, sea, and space platforms, enabling reliable navigation, control, and guidance. These systems are integral to tactical and strategic defense operations, particularly where satellite-based positioning is unavailable, degraded, or denied. By integrating advanced sensors with onboard processing, inertial technologies support mission-critical functions in contested and GPS-denied environments.
Military inertial systems support multiple critical operational requirements:

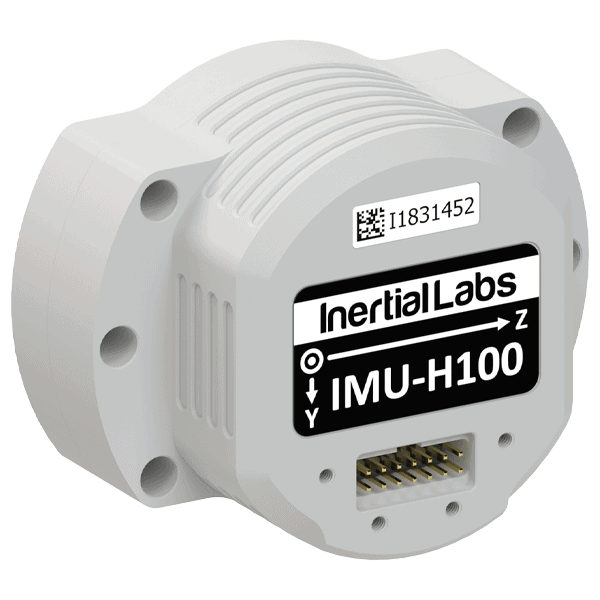
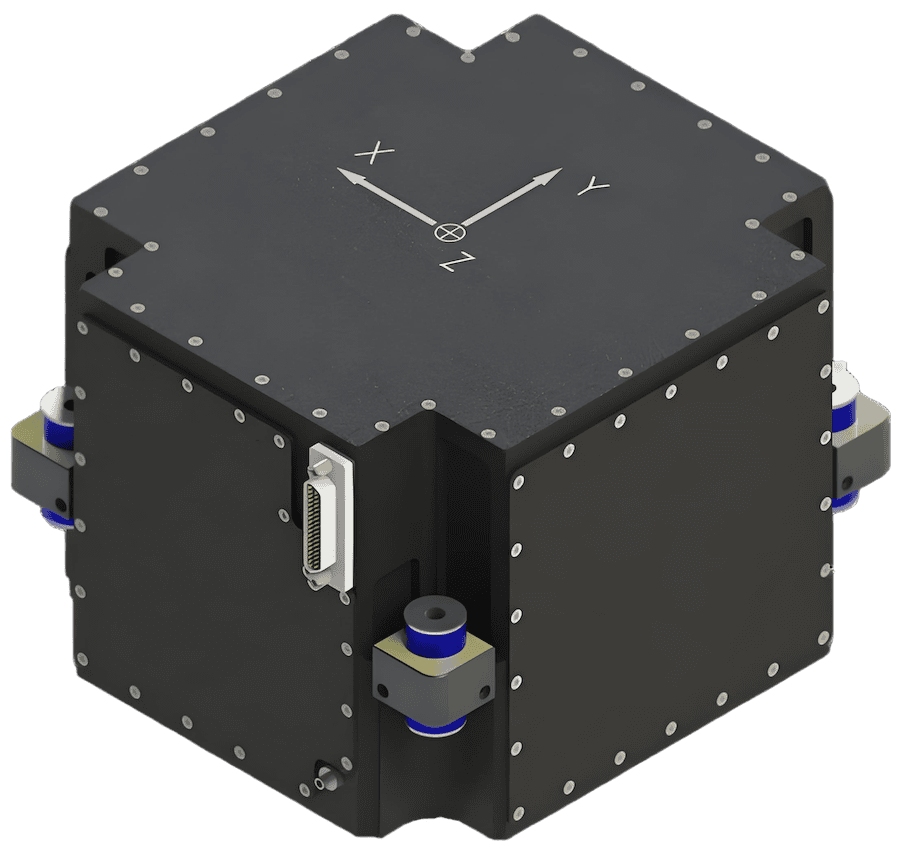
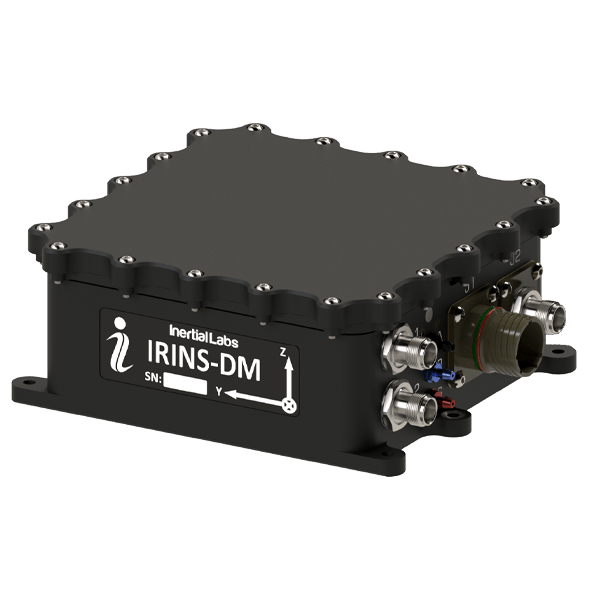
INS-DM-FI GPS-Aided Inertial System by InertialLabs
Navigation in GPS-denied environments: Enables autonomous movement and location tracking
These systems are integral to aircraft avionics, naval combat systems, ground combat vehicles, satellite payloads, and strategic weapons platforms.
Gyroscopes detect angular velocity and form the backbone of attitude estimation. Types include:
Accelerometers measure linear acceleration along specific axes and are critical for computing changes in velocity and position.
IMUs combine multiple gyroscopes and accelerometers to provide six-degree-of-freedom motion data (3-axis acceleration + 3-axis rotation). Categories include:

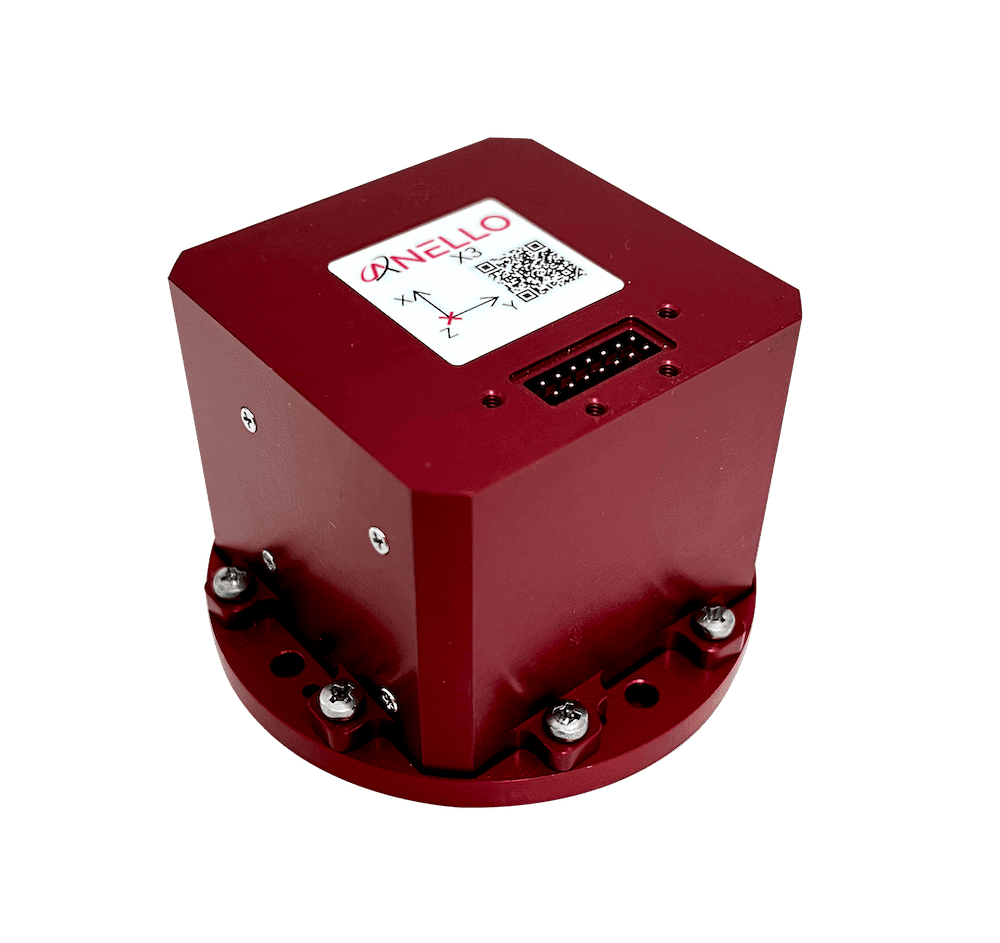
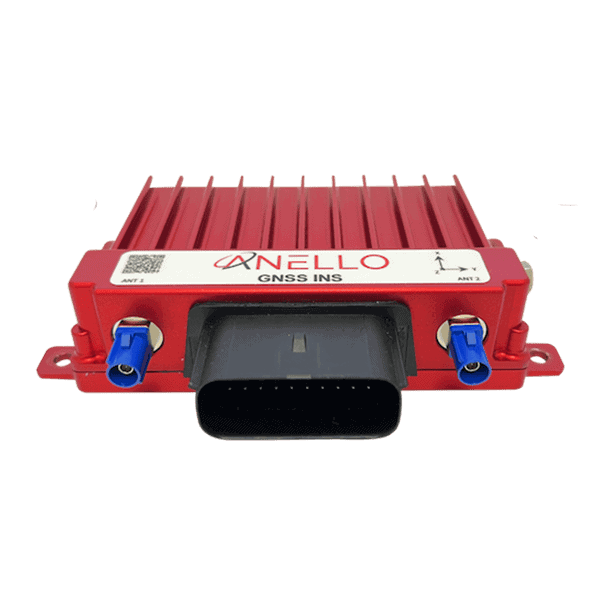
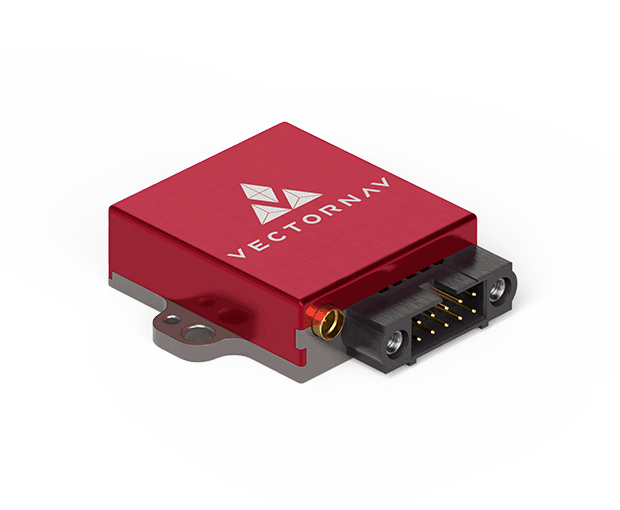
VN-110E Tactical IMU AHRS by VectorNav
Low-cost MEMS IMUs: Found in expendable munitions and compact robotic platforms
Inertial navigation systems integrate IMU data with computation to estimate real-time position, orientation, and velocity. Key configurations:
In many systems, INS units include an embedded flight computer and communications interface to provide data to other subsystems.

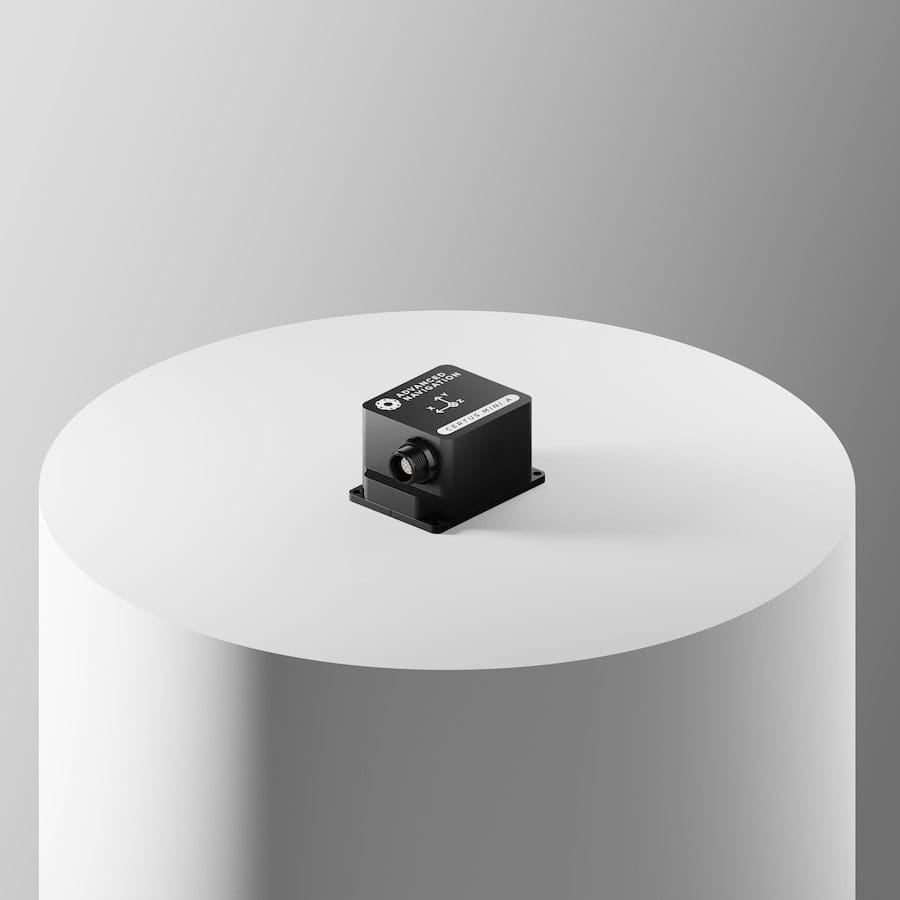
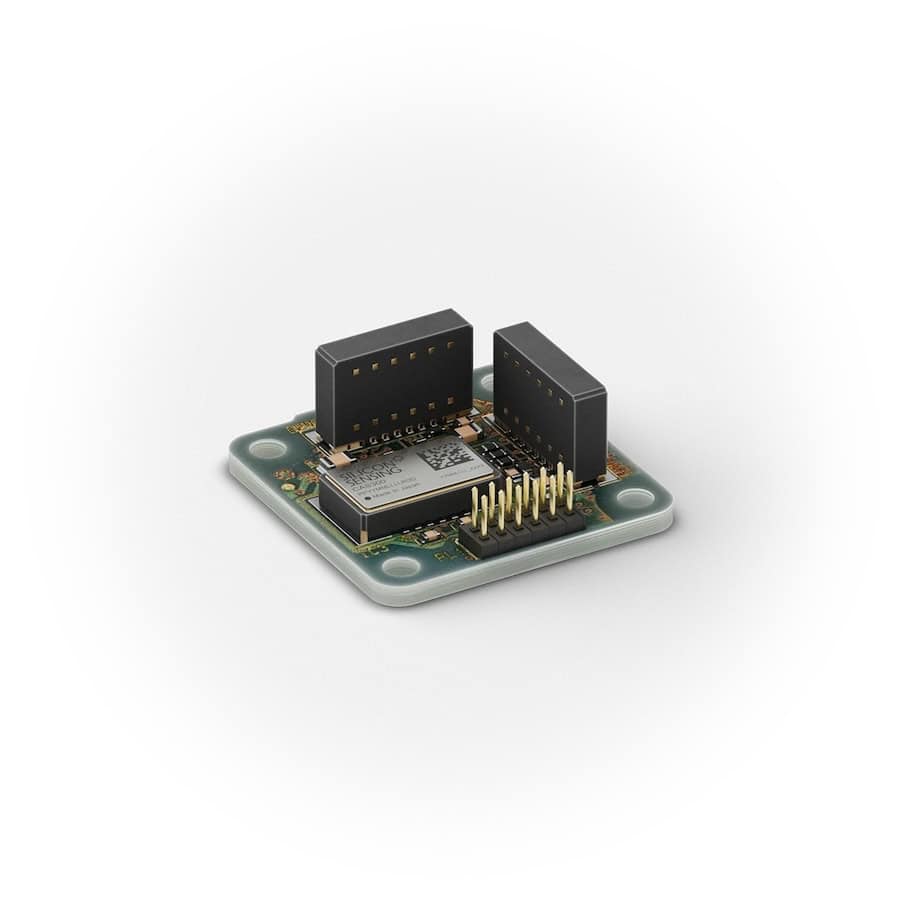
3DM-GV7-AR Vertical Inertial Reference Unit by Hottinger Brüel & Kjær
An Inertial Reference System (IRS) is a higher-level component that outputs navigation and attitude data to a broader system, including cockpit displays and autopilots. Inertial Reference Units (IRUs) offer similar functionality in modular configurations, often used in integrated fire control systems or antenna stabilization modules.
These systems often provide:
Inertial performance relies heavily on supportive electronics and mechanical systems, including:
Optoelectronic elements like fiber couplers, beam splitters, and photodetectors are also critical in FOG and RLG assemblies.
Military inertial systems are designed and validated according to strict defense and aerospace standards:
Additional qualifications include:
Drift is a critical limitation of pure inertial systems. Advanced military solutions mitigate this via:
Modern military inertial systems are evolving toward:
Inertial systems serve as a sovereign capability for defense forces, offering fully independent navigation that cannot be externally denied or manipulated. Their use ensures mission continuity in degraded signal environments and supports precision engagement, autonomous system operation, and survivable C2 systems.
From submarine deployments and aerial combat to autonomous ISR and next-generation hypersonic weaponry, inertial systems remain at the forefront of military technology.


 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.