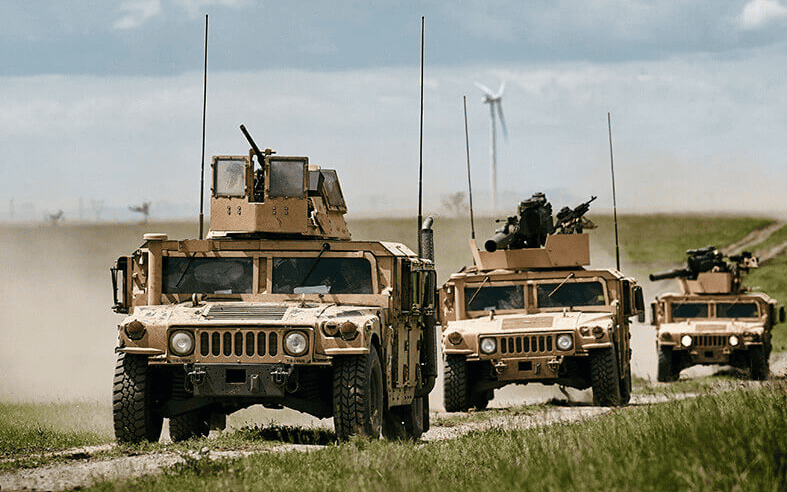
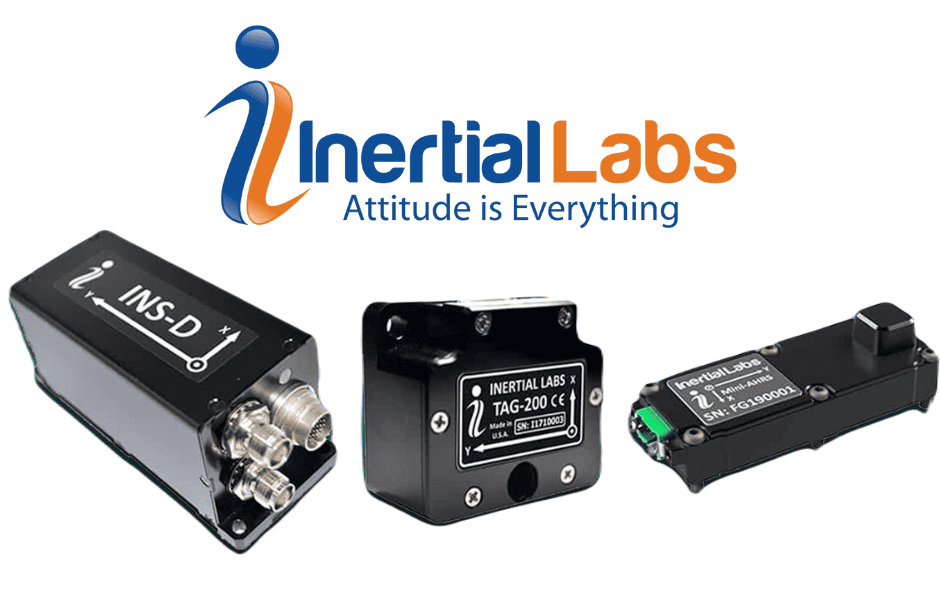
Inertial Labs is a global leader in the development of cutting-edge positioning, navigation, pointing, and platform stabilization solutions for military, defense and aerospace applications.
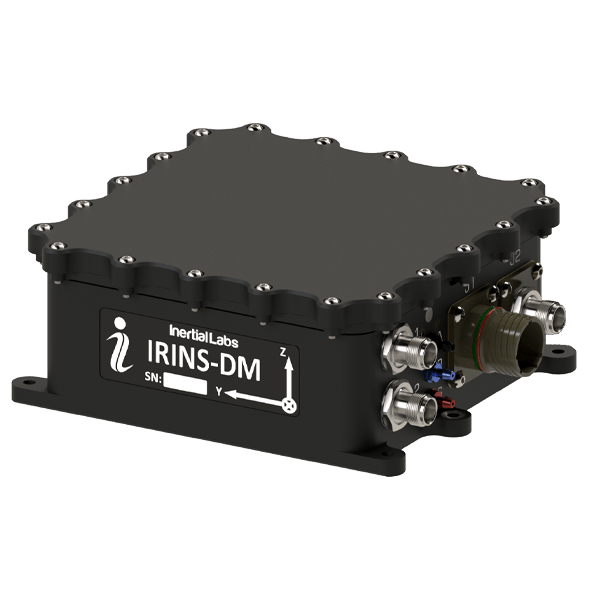
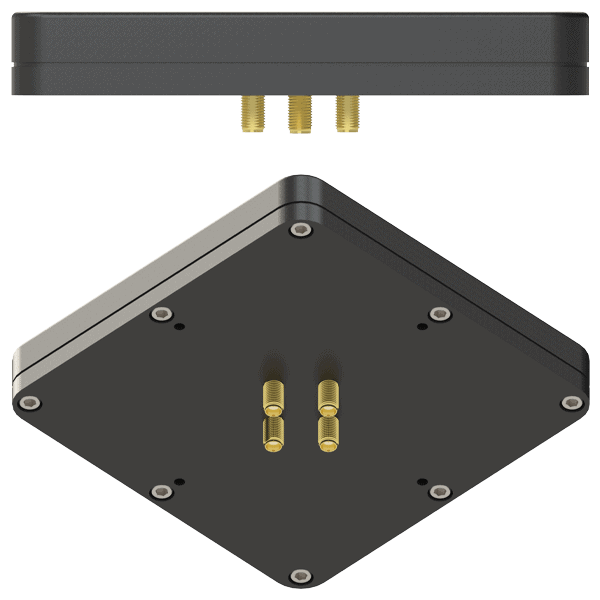
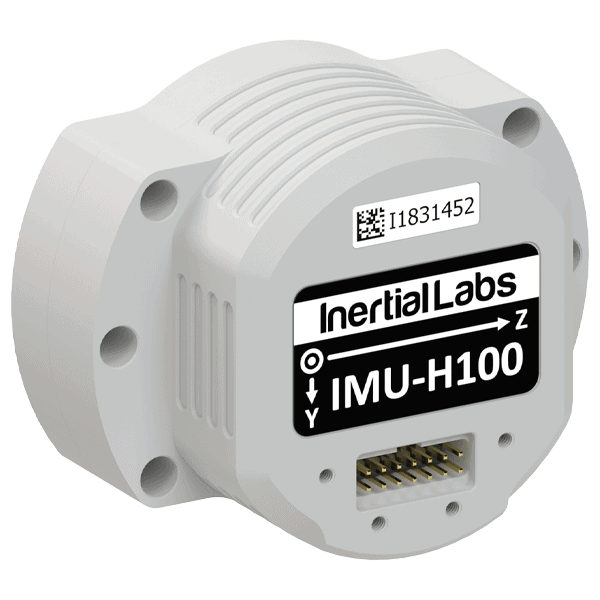
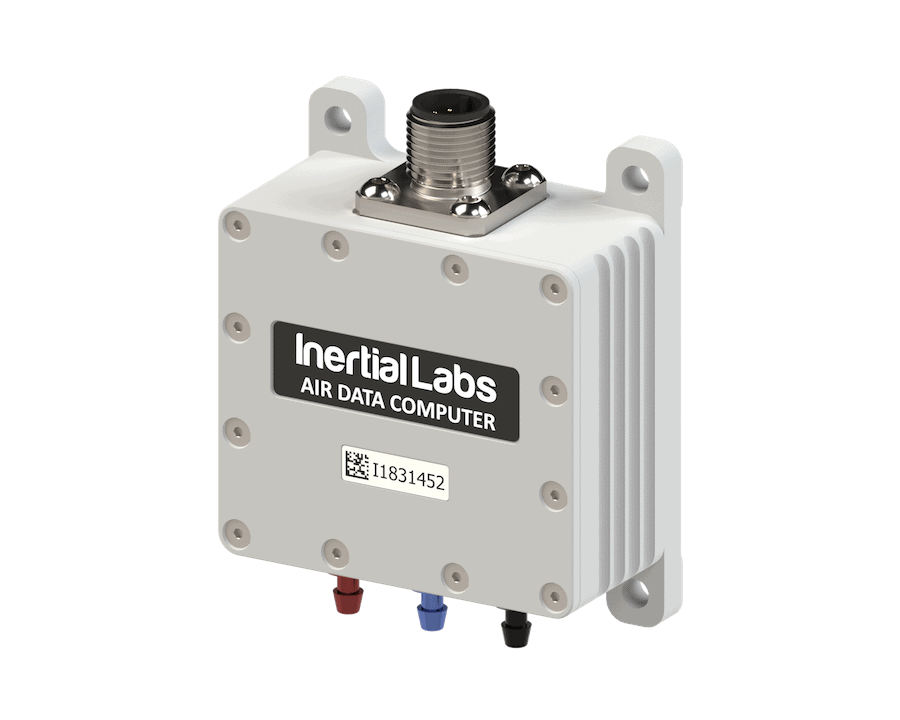
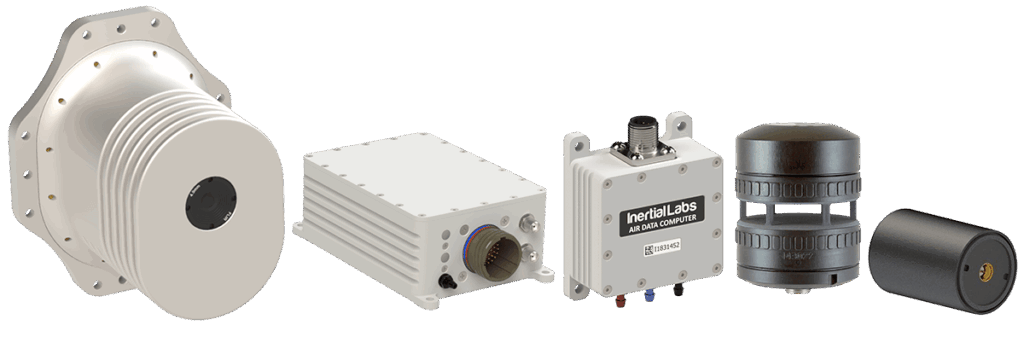
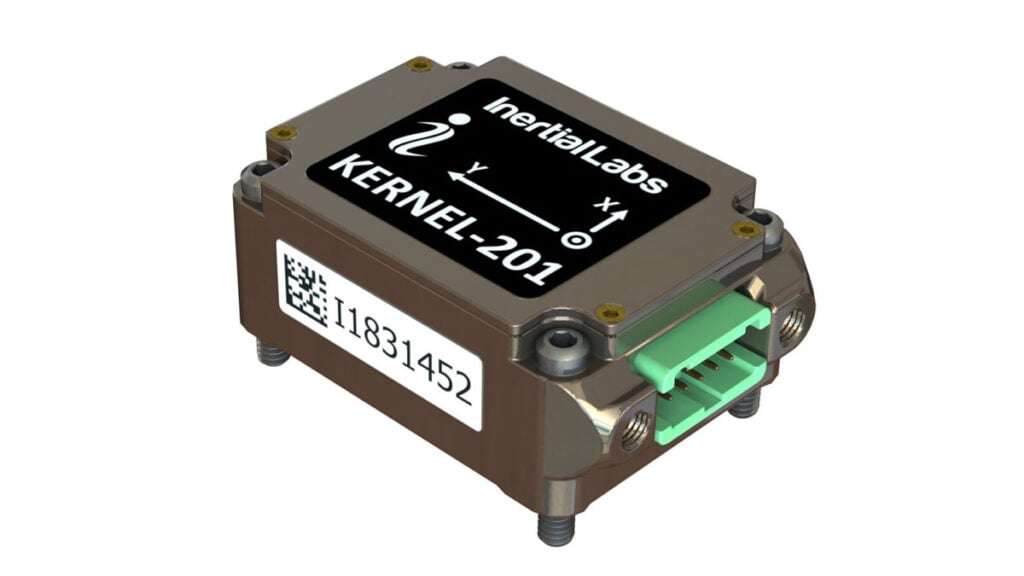
Our groundbreaking inertial sensing products which include; weapon orientation modules, three-axis gyroscopes, military grade IMUs, high-performance AHRS, and GNSS-aided INS, have been used to solve highly challenging problems in the air, on land and at sea, and can be customized to suit the most exacting of mission requirements.
 Our certifications include:
Our certifications include: