Attitude and Heading Reference Systems (AHRS) are pivotal to the reliable operation of modern drones and military aircraft, delivering essential orientation and motion data for navigation and flight control. AHRS enables precise monitoring of pitch, roll, yaw, and heading by utilizing a combination of gyroscopes, accelerometers, magnetometers, and advanced sensor fusion algorithms. In unmanned aerial vehicles (UAVs), these systems underpin autonomous navigation, stability, and mission-critical performance across various defense applications. This page explores the function, design, integration, and advantages of AHRS across military-grade UAVs and aircraft platforms.
If you design, build or supply Attitude and Heading Reference Systems (AHRS), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
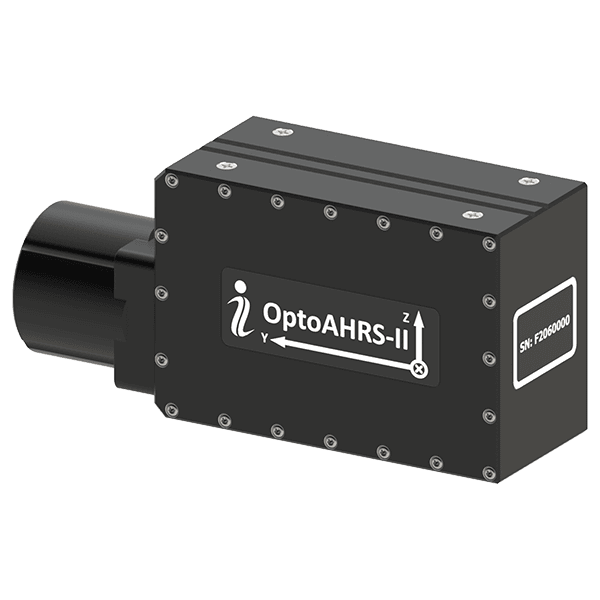
FOG AHRS & INS for GPS-denied navigation & resilient heading
FOG AHRS & INS for GPS-denied navigation & resilient heading
...pe (FOG)-based Attitude and HeadingReferenceSystem(AHRS) and Inertial Navigation System (INS)... ...ps and control systems. Typical defense uses include mission navigation, guidance, and equipment...
An Attitude and Heading Reference System (AHRS) is an integrated system that combines data from multiple inertial sensors to compute the absolute orientation of an aircraft or UAV in three-dimensional space. It provides continuous estimates of pitch, roll, and yaw using a blend of sensor technologies, primarily MEMS-based gyroscopes, accelerometers, and magnetometers. The integration of these components allows the AHRS to maintain accurate attitude and heading information, even under dynamic motion or temporary GPS signal loss.
3DM-GX5-AHRS Attitude & Heading Reference System from MicroStrain by HBK.
Sensor fusion algorithms lie at the heart of modern AHRS, merging noisy, raw data from the inertial measurement unit (IMU) to produce stable and accurate orientation outputs. This data is critical for autopilot systems, flight control computers, and avionics, especially in defense applications where precision and redundancy are vital.
Applications of AHRS in Military Drones and Aircraft
In military-grade UAV systems and aircraft, AHRS technology supports a broad array of flight-critical operations. These systems are responsible for:
Maintaining stable flight dynamics in autonomous and remotely piloted aerial platforms
Enabling accurate navigation system functionality, especially during GNSS-denied operations
Assisting in weapon targeting systems and sensor alignment
Supporting telemetry and real-time flight data analysis
Enhancing safety during complex flight maneuvers or adverse environmental conditions
In fixed-wing and rotary military aircraft, AHRS replaces or augments traditional gyroscopic instruments, often forming part of an Inertial Navigation System (INS) or a full avionics suite. In UAVs, especially tactical or ISR (Intelligence, Surveillance, and Reconnaissance) platforms, AHRS modules often integrate directly into the drone flight controller or autopilot system, providing precise input for stability and navigation routines.
AHRS Design Considerations and Components
Depending on their intended application, AHRS units vary in complexity, robustness, and size. In manned military aircraft, they are typically embedded within larger avionics architectures and may include redundant units for fault tolerance. In UAVs, space and weight constraints lead to highly compact MEMS AHRS modules designed to meet rigorous MIL-SPEC or aerospace standards.
Core components include:
Gyroscopes: Measure angular velocity around the aircraft’s three axes
Accelerometers: Detect linear acceleration and help determine gravitational vectors
Magnetometers: Measure Earth’s magnetic field to determine absolute heading
Sensor fusion processors: Execute real-time algorithms for data blending, Kalman filtering, and correction
Redundancy, environmental sensing, and electromagnetic shielding are additional design features found in defense-grade AHRS systems to ensure reliability under vibration, temperature variation, and electromagnetic interference (EMI).
Integration into UAV and Aircraft Flight Control Systems
AHRS sensors are deeply integrated into the flight control system of UAVs and aircraft, serving as the foundation for aircraft attitude awareness and dynamic response. When integrated with a GPS receiver and barometric altimeter, AHRS becomes part of a complete inertial navigation system, capable of providing position, orientation, and velocity without external input.
In drones, this information supports real-time feedback loops within the autopilot software, allowing for adaptive flight path corrections, dynamic stabilization, and precise waypoint navigation. In manned aircraft, AHRS interfaces with avionics displays, autopilot systems, and sometimes helmet-mounted displays for pilot orientation support.
Flight data collected from the AHRS is also crucial during flight testing and system certification, where detailed analysis of pitch, roll, yaw, and heading helps validate airframe and control software performance.
Comparing AHRS With Similar Technologies
While AHRS and IMUs share similar sensor components, they differ significantly in output. An IMU provides raw acceleration and angular velocity data, requiring additional processing to extract orientation. AHRS, on the other hand, delivers orientation and heading information directly, with internal fusion and filtering included.
Compared to older gyroscopic attitude indicators, AHRS offers:
Higher accuracy and drift compensation
Greater reliability due to solid-state components
Digital output compatible with modern flight control and avionics systems
Faster response time and adaptive filtering for dynamic environments
AHRS may also be integrated with motion reference units (MRUs) or inertial reference units (IRUs) for enhanced performance in multi-axis environments such as VTOL drones or aircraft conducting low-altitude tactical maneuvers.
Challenges and Advancements in AHRS Technology
Developing robust AHRS solutions for defense platforms involves overcoming several challenges, including magnetic distortion, thermal drift, and vibration resilience. Military AHRS must deliver consistent performance across environments, from high-altitude UAV reconnaissance to low-level flight through GPS-jammed airspace.
VN-100 Rugged IMU/AHRS by VectorNav.
Recent advancements in AHRS design include:
Enhanced MEMS sensors with improved sensitivity and noise reduction
AI-assisted sensor fusion algorithms for faster and more accurate orientation estimation
Miniaturization of components for ultra-compact UAV platforms
Cross-sensor integration with GNSS, barometric sensors, and environmental inputs
Emerging trends also point toward collaborative navigation systems, where multiple AHRS-equipped platforms share orientation and positioning data for coordinated operations.
Reliability and Failure Mitigation
In mission-critical defense systems, AHRS failure can have significant consequences. For this reason, advanced redundancy strategies are often employed. These may include dual or triple AHRS modules, fault-detection software, and fallback mechanisms using alternative orientation estimators or IMU-only data in the event of magnetic anomaly detection.
Robust testing protocols, including accelerated life testing, vibration testing, and flight testing under variable environmental conditions, help verify the reliability of AHRS in operational theaters.
AHRS Selection for Defense Applications
Choosing the right AHRS system involves evaluating several factors based on the intended aircraft type and mission profile:
Required attitude accuracy and heading precision
Environmental and mechanical resilience
SWaP constraints (Size, Weight, and Power)
Integration requirements with existing avionics or flight control architecture
Compliance with defense and aerospace standards (e.g., DO-178C, MIL-STD-810)
Vendors may offer customization options, allowing defense integrators to tailor AHRS modules for specific UAV systems, aircraft configurations, or avionics packages.
AHRS Now and in the Future
AHRS systems are a fundamental component in the avionics and control architecture of modern drones and military aircraft. AHRS enables safe, stable, and autonomous flight across various defense applications by providing real-time, reliable orientation and heading data through advanced sensor fusion and MEMS technology. As drone capabilities expand and aircraft systems evolve toward more intelligent, connected, and unmanned solutions, the role of AHRS will remain central to achieving precision, resilience, and operational effectiveness in demanding mission environments.
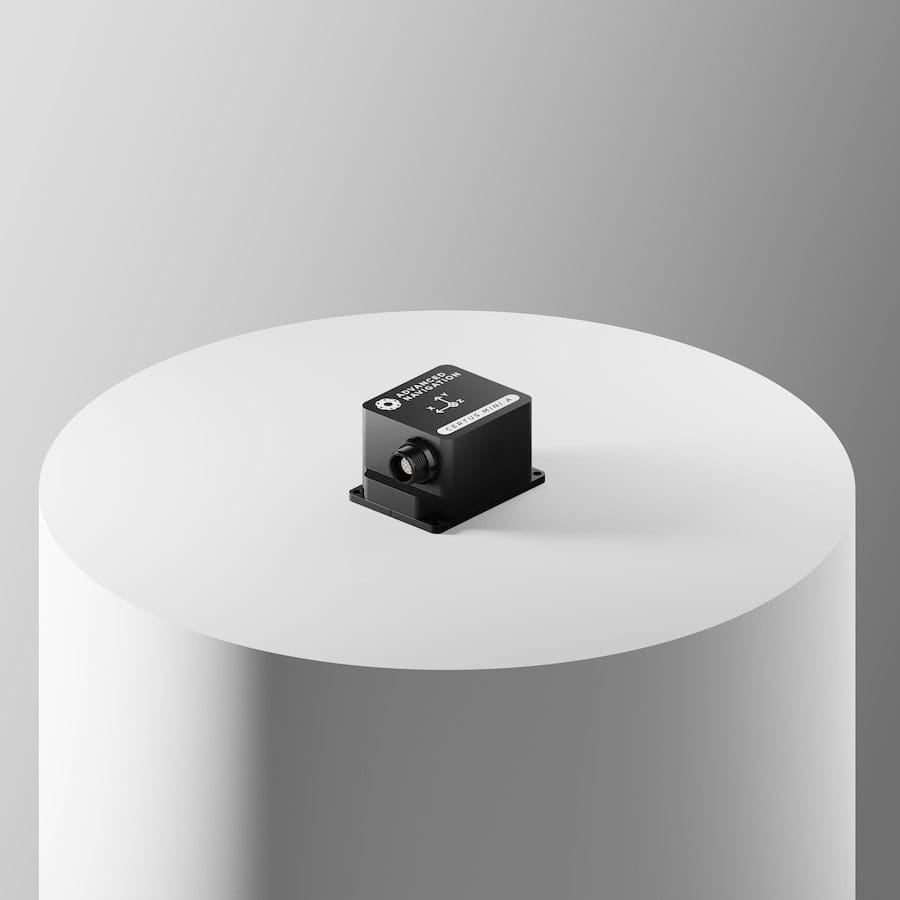
Advanced Navigation enables C-UAS platforms on commercial vehicles to maintain accurate heading and positioning in GNSS-denied environments using scalable, resilient inertial navigation solutions
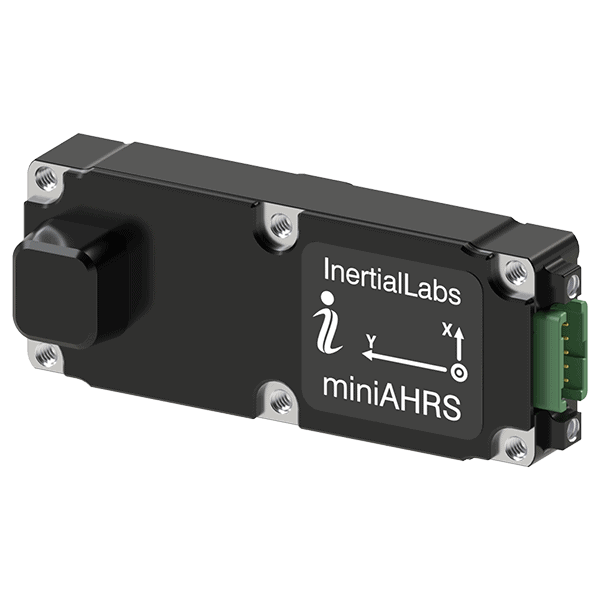
Inertial Labs recently showcased advanced inertial navigation and GNSS-denied technologies at the World Defense Show 2026, enhancing precision positioning and mission-critical performance across autonomous defense platforms
Advanced Navigation outlines how inertial navigation systems maintain radar and effector synchronization in GPS-denied environments to support reliable counter-UAS tracking and engagement under electronic warfare conditions
Ben Grant from Impact Subsea explores the role of compact sonar and navigation sensors in defense and naval operations, highlighting integration flexibility, operational insights, and evolving requirements for autonomous underwater platforms
Hottinger Brüel & Kjær’s (HBK's) PULSE system helps BAE Systems’ Type 26 Frigate maintain acoustic stealth, giving crews real-time control over hull vibration and noise
HBK now offers PX4 drivers for its advanced 3DM-CV7-AR and 3DM-CV7-AHRS sensors, supporting developers with robust inertial data solutions for UAVs and autonomous robotics
The new GV7 range includes IP68-rated protection and uses the same footprint as the preceding GX5 series
Oct 01, 2024
Advancing Defense Capability Through Strategic Collaboration
Defense Advancement works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive defense capabilities forward.