Inertial Navigation Systems (INS) for Defense and Military Applications
Inertial navigation systems (INS) deliver precise position, velocity, and orientation data without relying on GPS. Using accelerometers, gyroscopes, and sensor fusion, they guide aircraft, submarines, autonomous vehicles, and weapons, ensuring mission success in GPS-denied environments.
If you design, build or supply Inertial Navigation Systems (INS), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
LEO-aided inertial navigation system for A-PNT in D3SOE operations
LEO-aided inertial navigation system for A-PNT in D3SOE operations
IRINS from Inertial Labs, a VIAVI Solutions Inc. company, is a Low Earth Orbit (LEO)-aided Inertial... ...ous and secure navigation and timing data without reliance on GNSS. The device includes an embedded...
FOG AHRS & INS for GPS-denied navigation & resilient heading
FOG AHRS & INS for GPS-denied navigation & resilient heading
...ding Reference System (AHRS) and InertialNavigationSystem(INS) engineered for military... ...as 50 supports navigation in GNSS-denied or degraded scenarios and provides sensor outputs suitable...
Inertial Explorer® (IE) maximizes the performance of your GNSS/INS hardware by ensuring you get the... Inertial Explorer runs within our familiar Waypoint GrafNav processing environment and data analysis...
......elivers scalable Global Navigation Satellite System (GNSS) with internal storage and INS options.... ......uding serial, USB, CAN and Ethernet, the PwrPak7 is ideal for base station or rover applications....
... OEM7® Global Navigation Satellite System (GNSS) inside and offers built-in Wi-Fi, on board NTRIP... ...... is a robust, high precision receiver ideal for ground vehicle, marine or aircraft based systems....
High-accuracy inertial navigation system for airborne, maritime and land platforms
High-accuracy inertial navigation system for airborne, maritime and land platforms
...s a ruggedised inertialnavigation unit built around a closed-loop fibre-optic gyroscope and... ... accelerometer system achieving accelerometer bias stability of ~10 µg....
Rugged Inertial Navigation System with Embedded GNSS & Advanced PIC Technology
Rugged Inertial Navigation System with Embedded GNSS & Advanced PIC Technology
...EO-FOG 3D Dual InertialNavigationSystem(INS) is a precise and reliable solution for military... ...Stabilization, Navigation, and Control: Ensures precise navigation for both manned and unmanned...
...Tactical Grade System, engineered for high-quality performance in demanding militaryapplications.... ...... is designed for integrator and OEM use in a variety of critical militaryapplications,...
Inertial Navigation Systems (INS) for Defense and Military Applications
Overview by
Sarah Simpson
Updated:
Introduction to Tactical Inertial Navigation Systems for Military Platforms
An inertial navigation system (INS) is a self-contained navigation solution that determines position, velocity, and orientation using internal motion sensors. Unlike GPS, which relies on satellite signals, an INS operates independently, making it essential for defense and military applications where external signals may be unavailable or compromised.
Reliable navigation is mission-critical for modern armed forces. Inertial navigation systems (INS) provide accurate positioning in GPS-denied or contested environments, ensuring the uninterrupted operation of military aircraft, submarines, autonomous ground vehicles, and precision-guided weapons. Resistant to GPS jamming, spoofing, and electronic warfare, INS technology enables forces to manoeuvre, target, and operate effectively even in the most hostile operational theaters.
Operating Principles of Inertial Navigation Systems
3DM-GQ7 GNSS-Aided INS by Hottinger Brüel & Kjær (HBK)
INS relies on an inertial measurement unit (IMU) that integrates data from accelerometers, gyroscopes, and sometimes magnetometers to track motion and orientation. By continuously calculating position changes based on acceleration and angular velocity, an INS can provide precise navigation data. Advanced systems use aiding sensors, such as barometers and Doppler radar, alongside error correction algorithms like the Kalman filter to improve accuracy and reduce drift.
INS operation involves a sequence of processes that convert raw motion data into accurate navigation information:
Data Collection and Sensor Fusion
An inertial navigation system collects raw data from multiple onboard sensors, including accelerometers, gyroscopes, and sometimes magnetometers, within its inertial measurement unit (IMU). Sensor fusion techniques combine and cross-verify these inputs to improve accuracy and reduce noise.
Integration of Motion Data
By continuously updating position based on detected accelerations and rotations, the INS calculates real-time changes in velocity, displacement, and orientation without relying on external signals. This step allows navigation in GPS-denied or contested environments.
Error Correction and Drift Management
Over time, small measurement errors can accumulate, causing positional drift. To counter this, military-grade INS use techniques such as drift compensation, sensor calibration, and hybrid navigation with GPS or other aiding sensors.
Kalman Filtering
A Kalman filter further refines navigation accuracy by filtering out noise and predicting optimal state estimates based on previous measurements. This algorithm is central to maintaining precision during extended GPS outages.
Defense & Military Applications of Inertial Navigation Systems
Inertial navigation systems (INS) play a critical role across all branches of the armed forces, providing reliable, high-precision navigation and positioning in scenarios where GPS is unavailable, degraded, or under threat. From aerospace missions and naval operations to missile guidance and subterranean manoeuvres, military INS solutions ensure operational effectiveness in some of the most challenging environments.
Aerospace and Air Force
Inertial navigation systems for military aircraft, UAV inertial guidance modules, and spacecraft INS provide precise navigation, attitude determination, and backup positioning when GPS is unavailable or degraded. In fast-moving air combat or long-range bombing missions, INS delivers uninterrupted navigation data, ensuring mission continuity even during electronic warfare.
Maritime and Naval Systems
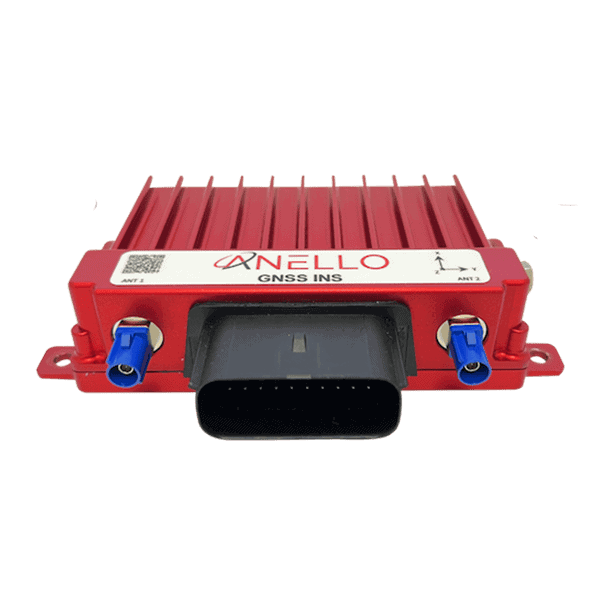
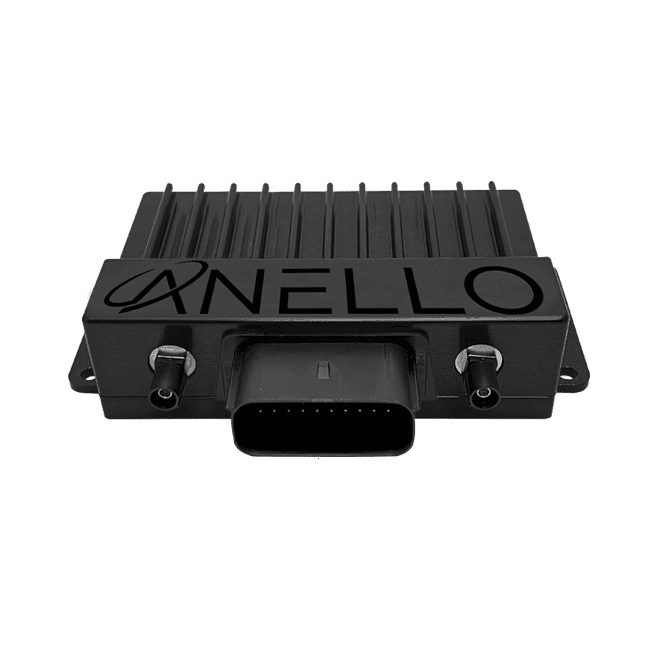
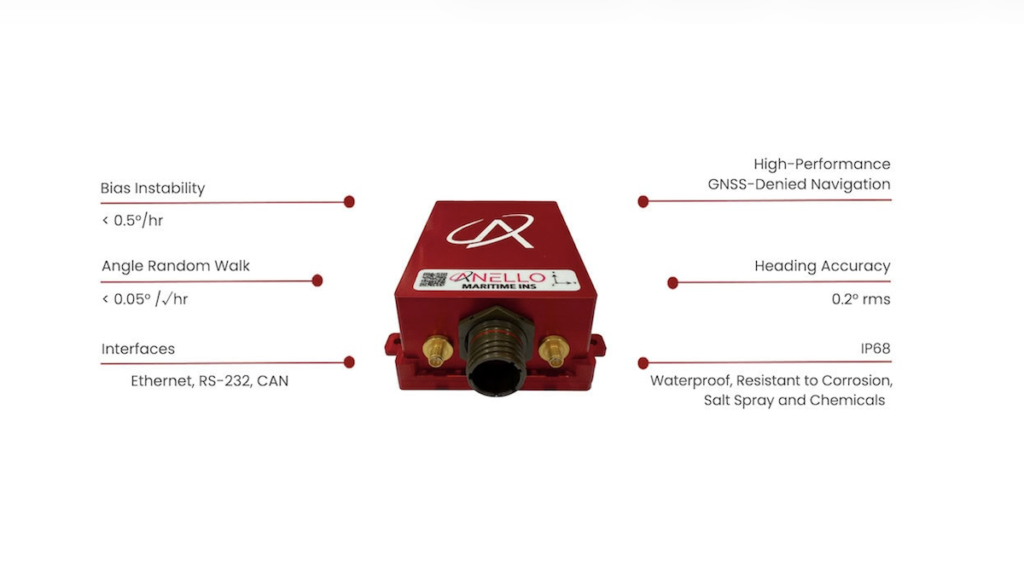
ANELLO Maritime INS by ANELLO Photonics
Submarines, surface vessels, and autonomous underwater vehicles rely on marine INS for navigation below the ocean’s surface, where GPS cannot penetrate. Military-grade maritime INS systems enable precise course-keeping, covert movement, and long-duration operations without surfacing for satellite fixes.
Military Ground Vehicles
From armoured personnel carriers to unmanned ground vehicles (UGVs), land INS enable autonomous navigation through complex terrain, urban environments, and GPS-denied battlefields. Tactical-grade systems support route planning, convoy coordination, and position reporting in environments affected by jamming, spoofing, or natural obstructions.
Missile Guidance and Weapons Systems
Precision-guided munitions, ballistic missiles, cruise missiles, and hypersonic weapons use missile INS for high-accuracy targeting and mid-course corrections. The ability to operate independently of external signals ensures strike capability even when adversaries attempt to disrupt GPS.
Underground and GPS-Denied Environments
Inertial navigation systems provide effective navigation in tunnels, caves, dense urban landscapes, and other environments where satellite signals are obstructed. For special operations forces and underground robotics, INS ensures positional awareness without relying on external infrastructure.
Components of Inertial Navigation Systems
Inertial Measurement Unit (IMU)
The Inertial measurement unit (IMU) is the core of an inertial navigation system, combining multiple sensors, typically accelerometers, gyroscopes, and sometimes magnetometers, to measure linear acceleration and angular motion across multiple axes. By continuously tracking these motion parameters, the IMU provides the raw data needed for precise navigation calculations. High-precision IMUs, often incorporating advanced fiber-optic, ring laser, or MEMS-based gyroscopes, significantly enhance navigation accuracy and minimize drift over time. In military and defense-grade INS solutions, IMUs are engineered to operate reliably in extreme environments, resisting shock, vibration, and temperature fluctuations while maintaining stable performance in GPS-denied conditions.
Accelerometers
Accelerometers measure linear acceleration along different axes (typically X, Y, and Z) and provide essential data for determining movement in three-dimensional space. By integrating acceleration data over time, the inertial navigation system calculates changes in velocity and displacement, forming a key part of its position estimation process. In high-performance military-grade INS, accelerometers are designed for exceptional sensitivity and stability, with low noise and minimal bias drift, ensuring accuracy during extended missions. These sensors may be based on micro-electromechanical systems (MEMS) for compact, lightweight platforms, or use more advanced technologies for strategic-grade navigation where precision is critical.
Gyroscopes
Gyroscopes detect angular velocity and help determine orientation. Precision gyroscopes, such as fiber-optic gyros, ring laser gyros, and MEMS gyroscopes, are used in modern inertial navigation systems. MEMS gyroscopes, in particular, are compact, lightweight, and cost-effective, making them ideal for small UAVs, portable defense systems, and applications where size, weight, and power consumption are critical. High-end military INS solutions often integrate fiber-optic or ring laser gyros for superior accuracy and stability, while MEMS gyroscopes are increasingly employed in tactical-grade and emerging hybrid navigation systems.
Magnetometers
Magnetometers measure the Earth’s magnetic field and are often used in inertial navigation systems to aid in heading determination and directional stability. By providing an independent magnetic reference, they enhance sensor fusion when combined with gyroscope and accelerometer data. While magnetometers are not always included in high-end military INS, particularly those designed for environments where magnetic interference is common, they can significantly improve accuracy in applications such as UAV navigation, maritime operations, and ground vehicle positioning. Advanced military-grade magnetometers are engineered to compensate for local magnetic anomalies and integrate seamlessly into the broader INS sensor suite.
Navigation Computer
The navigation computer is the processing hub of an inertial navigation system. It receives raw data from the IMU, magnetometers, GPS/GNSS modules, and other aiding sensors, then executes advanced algorithms to estimate position, velocity, and orientation. In defense and aerospace applications, the navigation computer must process large volumes of data in real time, maintain high fault tolerance, and deliver accurate results under extreme environmental conditions. Many modern systems feature redundant processing units and embedded AI capabilities to enhance sensor fusion, detect anomalies, and adapt to dynamic mission requirements.
Kalman Filter
A Kalman filter is a mathematical algorithm used extensively in INS to optimally combine sensor data from multiple sources, such as gyroscopes, accelerometers, and GPS/GNSS receivers. By filtering out noise and predicting the system’s next state based on previous measurements, it refines navigation accuracy and stability. This predictive capability is critical for minimizing drift in inertial navigation systems, especially during extended GPS outages. In advanced military-grade INS, adaptive or extended Kalman filters are implemented to handle non-linear motion models, improve error correction, and ensure robust performance in complex operational environments.
GPS/GNSS Integration
Many modern inertial navigation systems incorporate GPS or other global navigation satellite system (GNSS) receivers for hybrid navigation. GPS-aided INS combines the continuous, self-contained measurements of the IMU with the absolute positional accuracy of satellite navigation, significantly enhancing overall performance. This integration is particularly valuable for long-duration missions, where inertial drift can accumulate over time. In defense applications, GPS/INS integration often includes anti-jamming, anti-spoofing measures, and the ability to seamlessly revert to pure inertial navigation in contested environments.
Other Aiding Sensors
Many other sensors can be integrated into inertial navigation systems to improve accuracy and reliability. These include barometers for altitude determination, odometers for ground speed measurement, Doppler radar for velocity estimation over terrain or water, and LiDAR for terrain mapping and obstacle detection. By providing external references for position estimation, these sensors help correct inertial drift, enhance situational awareness, and maintain accurate navigation in GPS-denied or degraded environments. In military systems, the choice of aiding sensors is tailored to the platform’s mission profile and operational conditions.
Types of Inertial Navigation Systems
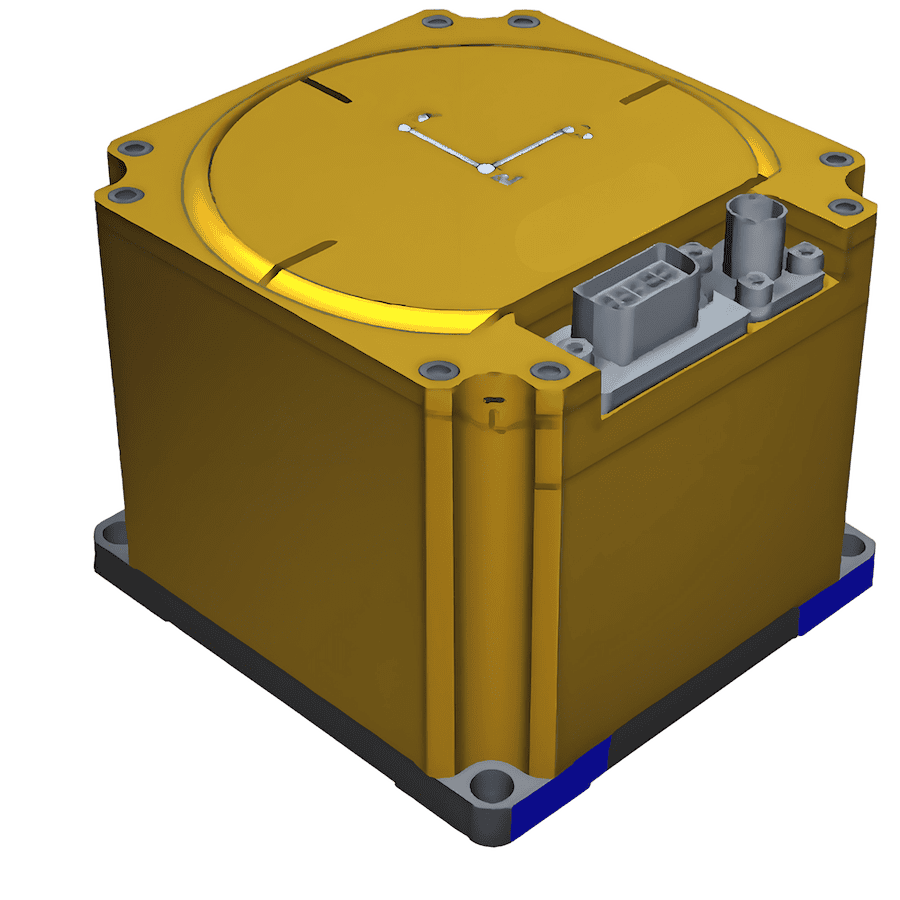
PETRA 3000 Inertial Navigation System by Honeywell
Strapdown INS
A strapdown inertial navigation system has its inertial measurement unit (IMU) fixed directly to the moving platform. It relies on high-speed digital processing and software-based algorithms to interpret raw sensor data and calculate motion. Strapdown systems are widely used in modern defense platforms, including UAVs, guided munitions, and land vehicles, due to their compact size, lower cost, and high reliability. They eliminate the need for mechanical gimbals, making them more rugged and suitable for environments with high vibration or shock.
Gimballed INS
A gimballed inertial navigation system uses a mechanically stabilised platform to isolate the IMU from platform movement. Historically common in aviation and maritime applications, gimballed systems maintain sensor alignment with the Earth’s reference frame, enabling highly accurate navigation over extended periods. While they are gradually being replaced by strapdown INS in many roles due to size and maintenance requirements, they remain valuable in certain long-duration missions where continuous accuracy is critical.
Hybrid INS
Hybrid inertial navigation systems combine core inertial sensors with external navigation aids, such as GPS/GNSS, Doppler radar, LiDAR, barometric altimeters, or visual odometry systems. This integration improves accuracy, mitigates drift, and ensures resilience in GPS-denied or degraded environments. In military operations, hybrid INS solutions are common on aircraft, naval vessels, and autonomous drone platforms, enabling continuous high-precision navigation by blending the strengths of multiple sensor types.
Advantages and Limitations of INS
Advantages of INS
Operates independently of external signals, making it resilient against GPS jamming
Provides high-speed, real-time navigation updates
Works in all environments, including underwater and underground scenarios
Limitations of INS
Sensor drift accumulates over time, requiring periodic corrections
Accuracy depends on sensor quality and calibration
Hybrid solutions are often needed for long-duration missions
INS vs Other Navigation Systems
Comparison Table of Inertial Navigation Systems (INS) with Other Navigation Technologies
Inertial Navigation System (INS)
GNSS (GPS/GNSS)
Dead Reckoning
Visual SLAM (Simultaneous Localization and Mapping)
Dependence on External Signals
No (fully self-contained)
Yes (requires satellites)
No (relies on internal motion estimates)
Yes (requires visual landmarks)
Accuracy Over Time
High for short durations, but drifts over time
High (global coverage) but can be jammed
Moderate, but error accumulates
High in structured environments, lower in featureless areas
Resistance to Jamming & Spoofing
Very High
Low (easily jammed/spoofed)
Moderate
Moderate to Low (depends on external visual data)
Use in GPS-Denied Environments
Excellent
No
Good
Poor to Moderate (depends on visibility)
Drift/Error Accumulation
Yes, unless corrected with aiding sensors
No
Yes, accumulates significantly over time
Yes, if visual landmarks are lost
Common Military Applications
Missile guidance, submarines, UAVs, aircraft
General navigation, tracking, targeting
Low-tech backup for INS
Robotics, UAVs in structured environments
Integration with Other Systems
Frequently integrated with GPS, radar, and other aiding sensors
Often combined with INS for hybrid navigation
Used as an aiding system for INS
Combined with INS for enhanced navigation in some applications
Best Use Cases
Navigation in GPS-denied environments, high-speed applications, military-grade positioning
General outdoor navigation, civilian & military applications
Short-range navigation in enclosed spaces
Robotics, autonomous vehicles, AR/VR applications
Cost
High (especially military-grade INS)
Low to Moderate
Low
Moderate to High, depending on complexity
Summary of INS Comparison Table
INS excels in GPS-denied environments and military applications but requires drift correction.
GNSS is ideal for general navigation but is vulnerable to interference.
Dead reckoning is a low-cost alternative but suffers from error accumulation.
Visual SLAM works well in structured environments but depends on external visibility.
Combining INS with GNSS, radar, LiDAR, or SLAM can offer hybrid navigation solutions that maximize accuracy and resilience.
Inertial Navigation System Accuracy Grades
Inertial navigation systems are commonly classified into different accuracy grades, reflecting their performance, drift rates, and intended applications.
Commercial Grade – Found in consumer electronics, drones, and basic navigation devices, these systems have higher drift rates and are not suitable for precision military operations.
Tactical Grade – Used in military vehicles, UAVs, and portable systems, tactical-grade INS offer improved accuracy and moderate drift control, often incorporating MEMS gyroscopes.
Navigation Grade – Designed for long-duration missions such as submarine navigation or strategic aircraft, these systems employ high-precision fiber-optic or ring laser gyros to achieve low drift over extended periods.
Strategic Grade – The highest level of performance, with extremely low drift rates, used in ballistic missile guidance, strategic submarines, and other critical defense platforms. These systems are engineered to maintain accuracy for weeks or months without external updates.
Maintenance and Calibration of Inertial Navigation Systems
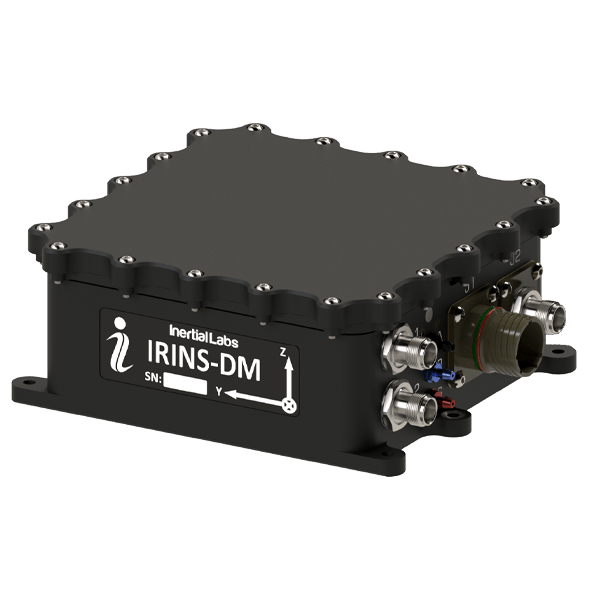
INS-DM-FI GPS-Aided INS by Inertial Labs, a VIAVI Solutions Company
Regular maintenance and calibration are essential to ensure the long-term accuracy and reliability of inertial navigation systems. Calibration involves adjusting the sensors, particularly accelerometers and gyroscopes, to correct for bias, scale factors, and alignment errors. This process may be carried out using specialized test equipment, reference motion profiles, or comparison against external navigation aids such as GPS or Doppler radar.
In military applications, INS maintenance schedules often include environmental stress testing, firmware updates, and sensor health monitoring to detect degradation before it affects mission performance. Field calibration capabilities are especially important for deployed systems, allowing operators to restore accuracy after shock, vibration, or exposure to extreme temperatures.
INS Buying Guide and Selection Criteria
Factors to Consider When Choosing an INS
Accuracy and drift rate: Higher accuracy and lower drift rates are crucial for long-duration missions.
Environmental conditions: Military INS solutions must withstand extreme temperatures, shock, and vibration.
Size and weight: Compact solutions are preferred for UAVs and portable applications.
Integration capabilities: Hybrid systems with GPS, LiDAR, or radar enhance performance.
Advances and Future Trends in Inertial Navigation Systems
As defense platforms operate in increasingly contested and GPS-denied environments, the next generation of inertial navigation systems (INS) is evolving to deliver greater accuracy, resilience, and adaptability. Key areas of innovation include:
MEMS-Based INS – Micro-electromechanical systems (MEMS) technology has enabled the development of compact, lightweight, and cost-effective INS solutions. By integrating MEMS gyroscopes and accelerometers, these systems provide reliable navigation for small UAVs, autonomous ground vehicles, and portable soldier systems where size, weight, and power constraints are critical. Their low-power design and mass-manufacturability make them ideal for wide deployment in tactical operations.
AI and Machine Learning in INS – Artificial intelligence is transforming sensor fusion, drift correction, and predictive navigation. AI-driven INS can adapt to changing operational conditions, compensate for sensor degradation, and maintain accuracy during GPS jamming or spoofing attacks. In military scenarios, this means more reliable targeting, route planning, and mission execution in high-threat environments.
Quantum Inertial Sensors – Quantum-based INS uses ultra-cold atoms or quantum interferometry to achieve unprecedented accuracy and stability without external references. These systems promise near-zero drift over long periods, making them a game-changer for strategic submarines, long-range missile systems, and space-based defense platforms that require weeks or months of continuous, GPS-independent navigation.
Advanced Sensor Fusion – Future INS architectures will combine inertial sensors with LiDAR, radar, electro-optical cameras, and Doppler radar to enhance situational awareness and positioning accuracy. This multi-sensor approach is particularly valuable for urban warfare, subterranean operations, and autonomous platform coordination, where line-of-sight navigation aids may be limited.
Emerging Research Areas – Ongoing development includes cold-atom INS for ultra-long endurance missions, radiation-hardened INS components for space and nuclear environments, and integrated navigation-targeting systems to improve precision-strike capabilities. These advances aim to extend operational reach, improve interoperability across platforms, and deliver a decisive tactical advantage.
While these developments hold significant promise, the integration of new sensor technologies into existing defense platforms requires overcoming challenges in interoperability, ruggedisation, and battlefield resilience. Nevertheless, the evolution of inertial navigation systems will remain a cornerstone of high-precision military navigation well into the future.
FAQ
What is an inertial navigation system (INS) and how is it used in the military?
An inertial navigation system (INS) is a self-contained navigation solution that determines position, velocity, and orientation using accelerometers and gyroscopes. In the military, INS is used in aircraft, submarines, missiles, unmanned vehicles, and ground platforms to ensure accurate navigation, even in GPS-denied environments.
How do inertial navigation systems work without GPS?
INS calculates position by integrating acceleration and rotation data over time, using an inertial measurement unit (IMU) and advanced algorithms. This allows military platforms to navigate without relying on external satellite signals, which can be jammed or spoofed.
What are the main components of a military-grade inertial navigation system?
Key components include an inertial measurement unit (IMU) with accelerometers, gyroscopes, and sometimes magnetometers, a navigation computer, a Kalman filter for data fusion, and optional aiding sensors such as GPS/GNSS receivers, Doppler radar, or barometers.
What accuracy grades exist for inertial navigation systems in defense applications?
INS is often classified into commercial, tactical, navigation, and strategic grades. These grades indicate drift rates and performance levels, with strategic-grade systems achieving the highest accuracy for long-duration missions like ballistic missile guidance or submarine navigation.
What is the difference between strapdown and gimballed inertial navigation systems?
Strapdown INS has sensors fixed directly to the platform, using software to calculate motion, making it lighter and more compact. Gimballed INS uses mechanically stabilised platforms, offering historically high accuracy but at greater size and complexity.
Why are INS critical for navigation in GPS-denied environments?
In GPS-denied environments caused by jamming, spoofing, or natural signal blockage, INS ensures continuous navigation by relying solely on internal sensors, maintaining mission capability for aircraft, submarines, and land vehicles.
What types of gyroscopes are used in military INS solutions?
Military INS often use high-precision gyroscopes such as fiber-optic gyros (FOG), ring laser gyros (RLG), and MEMS gyroscopes. The choice depends on the required accuracy, size, weight, and power constraints of the platform.
How does a Kalman filter improve the performance of inertial navigation systems?
A Kalman filter combines sensor data, removes noise, and predicts optimal position estimates, reducing drift over time. In military applications, extended Kalman filters handle complex motion and integrate multiple aiding sensors for greater accuracy.
What are the advantages and limitations of using INS for missile guidance?
INS offers independence from external signals, high-speed position updates, and resistance to electronic warfare, making it ideal for missile guidance. However, drift errors accumulate over time, so integration with GPS or radar is often used for long-range missions.
How is an INS integrated with GPS/GNSS for hybrid military navigation?
In hybrid systems, INS provides continuous navigation while GPS/GNSS corrects drift and offers absolute positioning. This combination ensures both resilience to GPS outages and long-term accuracy in military operations.
What maintenance and calibration procedures are required for military INS?
Maintenance includes periodic calibration of accelerometers and gyroscopes to correct sensor bias, firmware updates, environmental testing, and fault monitoring. Field calibration may also be performed after shock, vibration, or exposure to extreme conditions.
What advancements are shaping the future of inertial navigation systems in defense?
Future developments include quantum inertial sensors with near-zero drift, AI-enhanced sensor fusion, integration with LiDAR and radar for multi-source navigation, and miniaturised MEMS-based systems for lightweight unmanned platforms.
In this Q&A, Dr. Kirstin Schauble from ANELLO Photonics outlines how the Maritime INS combines SiPhOG inertial sensing, AI-powered sensor fusion, and spoofing detection to deliver reliable navigation in GNSS-denied maritime environments
Honeywell Aerospace's new Kestrel system brings secure, high-accuracy positioning to smaller defense and commercial platforms operating in GPS-denied environments
ANELLO Photonics outlines how its Maritime INS combines SiPhOG™ optical gyroscope technology, multi-sensor fusion, and real-time state estimation to support resilient maritime navigation during GPS jamming, spoofing, signal degradation, and GNSS-denied operations
Advanced Navigation discusses comprehensive Evaluation Kits for the Boreas 50 INS Series, providing engineers with all necessary components in a rugged case to ensure immediate performance validation upon the first power-up
Advanced Navigation has addressed the escalating risks of electromagnetic warfare by developing resilient INS that maintain absolute positioning confidence and combat readiness for vessels operating in fully contested environments
ANELLO Photonics’ Maritime Inertial Navigation System has been selected by BlackSea Technologies for integration into an autonomous surface vessel, delivering assured, high-precision navigation in GNSS-denied and contested maritime environments
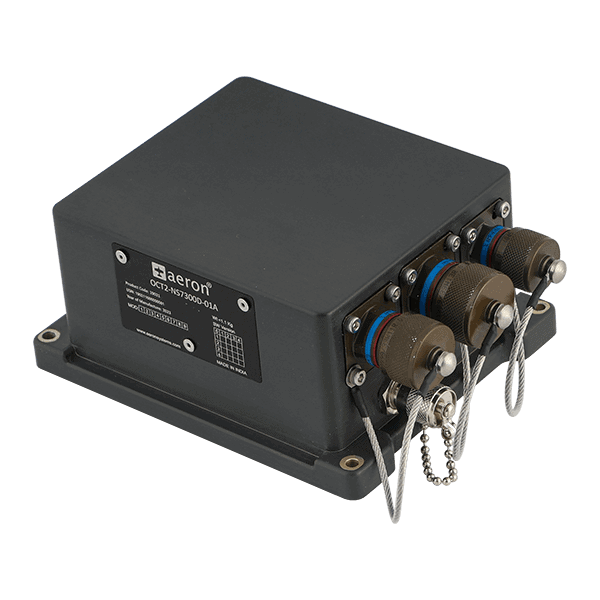
Aeron Systems’ Octantis 2 INS-GNSS provides accurate positioning and navigation for defence and other platforms in GNSS-degraded or denied environments
Inertial Labs recently showcased advanced inertial navigation and GNSS-denied technologies at the World Defense Show 2026, enhancing precision positioning and mission-critical performance across autonomous defense platforms
Apr 16, 2026
Advancing Defense Capability Through Strategic Collaboration
Defense Advancement works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive defense capabilities forward.