Military land vehicle Inertial Navigation Systems (INS) provide continuous positioning, velocity, attitude, and heading data independent of external navigation signals. These systems support main battle tanks, infantry fighting vehicles, armored personnel carriers, self-propelled artillery, and Unmanned Ground Vehicles (UGV) operating in GNSS-denied and contested electromagnetic environments.
This page features leading in-vehicle inertial navigation systems and vehicle-mounted inertial navigation systems designed for resilient PNT, sensor fusion, autonomous mobility, and mission-critical navigation.
If you design, build or supply Land Vehicle Inertial Navigation Systems (INS), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
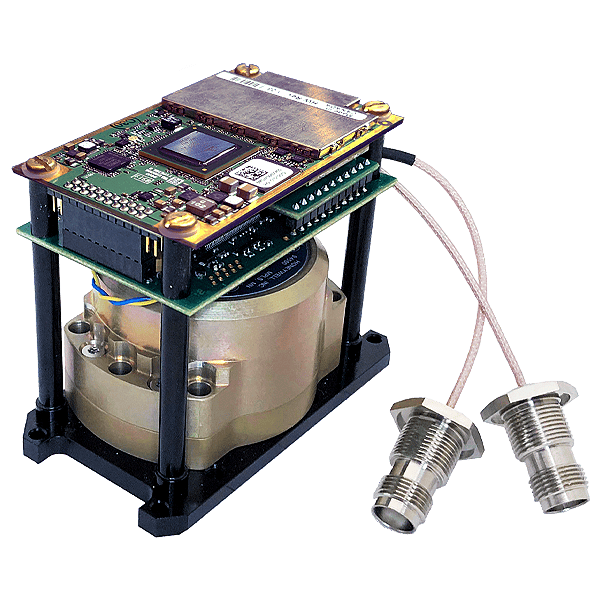
OEM dual-antenna GNSS-INS with Honeywell HG4930 IMU
OEM dual-antenna GNSS-INS with Honeywell HG4930 IMU
The Inertial Labs GPS-Aided InertialNavigationSystem(INS-DH-OEM) is an OEM version of the new... The INS-DH-OEM is an industrial-grade GNSS-aided MEMS inertialnavigationsystem in an OEM form...
Combines with SPAN GNSS+INS technology providing 3D position, velocity and attitude
Combines with SPAN GNSS+INS technology providing 3D position, velocity and attitude
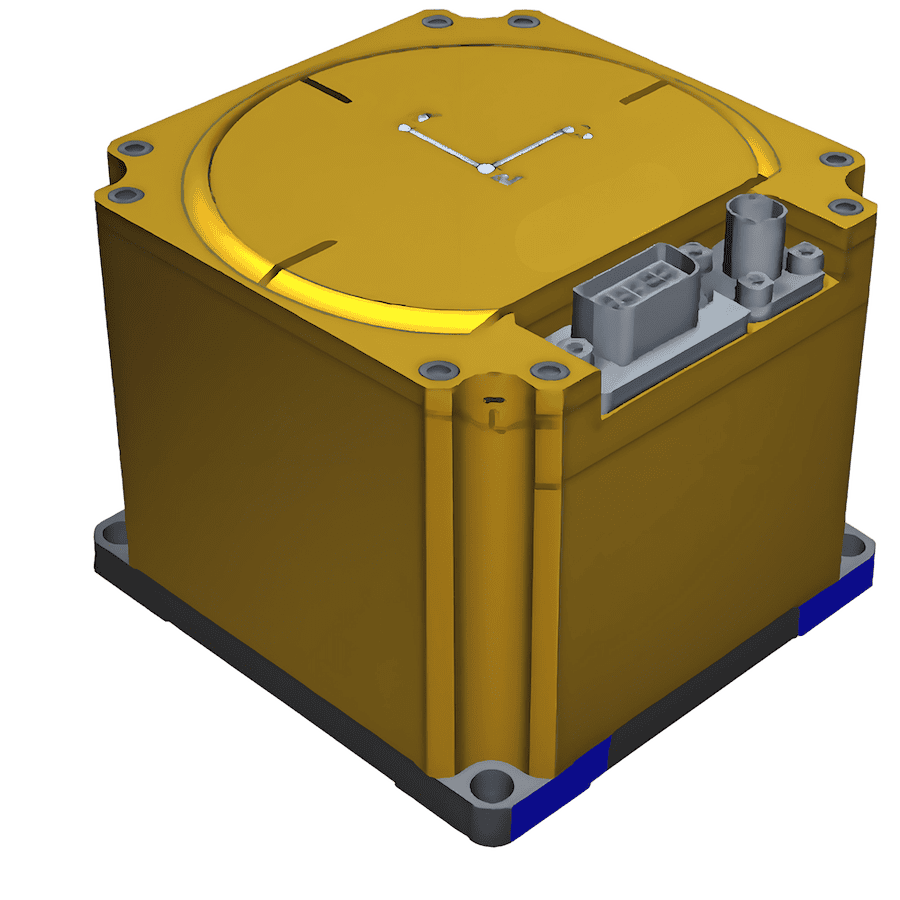
High end tactical grade Mems IMU enclosure for commercial and military guidance and navigation... The IMU-HG1900 offers a hybrid package of Honeywell’s Micro Electromechanical Systems (MEMs) Gyros...
Overview of Tactical Land Inertial Navigation Systems for Military Ground Vehicles
Overview by
William Mackenzie
Updated:
Introduction to Inertial Navigation Systems for Military Ground Vehicles
In-vehicle inertial navigation systems have become a core capability for modern military ground vehicles, offering continuous positioning, velocity, and heading information completely independent of external signals. Unlike satellite-reliant architectures, a vehicle-mounted inertial navigation system calculates motion via onboard sensors, ensuring that crews retain situational awareness when communications break down or Global Navigation Satellite System (GNSS) links are completely lost.
In contested electromagnetic environments where electronic warfare and deliberate jamming are common, these vehicle-mounted INS solutions provide a secure source of Position, Navigation, and Timing (PNT) data. By deploying tactical advanced land inertial navigation systems that integrate with vehicle electronics and mission computers, military land platforms maintain critical mobility and operational readiness across any high-threat combat theater.
Core Functions of INS for Different Military Vehicle Types
Main Battle Tanks (MBTs)
Main battle tanks operate in the most severe environments on Earth. Urban centers, dense forests, mountainous sectors, and high-intensity combat zones introduce extreme shock, vibration, and signal blockage. A tactical-grade INS delivers highly accurate heading and attitude data directly to the tank’s fire-control system, ensuring weapons and electro-optical sensors remain accurately stabilized and aligned while the tank fires on the move across broken terrain. Additionally, blue-force tracking and battle management systems rely on this uninterrupted position data to coordinate armored maneuvers and prevent accidental engagement when GNSS is blocked.
Infantry Fighting Vehicles (IFVs)
IFVs must combine rapid tactical mobility and troop protection while operating in close coordination with armored units. Modern IFVs use inertial data as the core variable in vehicle-wide sensor fusion networks, anchoring radar, active protection systems (APS), and thermal imaging payloads. This robust navigation framework also prevents tracking dropouts caused by urban canyons, tunnels, and structural masking.
Armored Personnel Carriers (APCs)
APCs focus on the safe transport of infantry squads across extended, unpredictable battlefields. INS-equipped APC variants maintain automated convoy tracking and route execution during complete communications blackouts. These fleet-wide deployments require a carefully optimized balance between military durability, compact footprints, and lifecycle affordability.
Self-Propelled Artillery Systems
Precision orientation and position data dictate the lethality and survivability of indirect fire assets. Onboard inertial navigation allows artillery units to roll into position, automatically compute precise elevation and azimuth lay lines, and fire without manual aiming circles or external references. By slashing setup and teardown times, the INS allows crews to engage targets and displace before counter-battery fire can be initiated, enabling effective shoot-and-scoot tactics.
Unmanned Ground Vehicles (UGVs)
As autonomous and semi-autonomous systems proliferate on the battlefield, the role of inertial hardware has expanded into the foundational layer of vehicle autonomy. While vision and ranging sensors provide environmental perception, autonomous path-planning and obstacle-avoidance algorithms rely heavily on a stable, high-rate motion reference from the INS. For UGVs operating deep in contested territory, resilient inertial navigation prevents mission failure during electronic attacks or command-link drops.
GNSS Integration & Navigation in Contested Electromagnetic Environments
This section examines how military vehicles navigate within highly contested electronic warfare environments through the integration of inertial arrays and satellite navigation.
Performance in GNSS-Denied and Degraded Environments
While satellite navigation offers excellent long-term global positioning accuracy, its signals are weak by the time they reach the Earth’s surface, making them trivial to disrupt. To counteract this vulnerability, defense platforms deploy a hybrid architecture known as an in-vehicle GNSS INS.
During standard operating conditions, the GNSS data continuously bounds and corrects the minor, time-dependent drift errors inherent to inertial sensors. When satellite tracking is lost, the system transitions smoothly to dead reckoning, leveraging the onboard sensors to preserve navigation integrity without interruption to the navigation solution.
Electronic Warfare Challenges
Electronic warfare has evolved navigation from a baseline utility into a highly contested capability. Peer adversaries deploy wide-area jamming systems, directional spectrum denial platforms, and localized electronic attack assets designed to break satellite lock across entire operational sectors. Ground vehicles must have the capacity to maneuver through these zones, a capability enabled primarily through high-performance tactical inertial navigation platforms, often supplemented by additional navigation sensors.
Anti-Jam and Anti-Spoofing Considerations
Spoofing attacks, where an adversary transmits false satellite signals to trick a vehicle’s receiver into reporting incorrect positioning coordinates, present a severe threat to ground maneuvers.
To counter this, a modern vehicle-mounted INS/GNSS receiver pairs cryptographic M-Code GPS or Controlled Reception Pattern Antennas (CRPA) with inertial validation software. Because inertial sensors are not affected by radio-frequency spoofing, the system can compare incoming GNSS measurements against independently derived inertial motion estimates. If a divergence is detected, the navigation filter may flag the GNSS data as unreliable and reduce or reject its contribution to the navigation solution.
Integration with Other Vehicle Positioning Technologies
To extend performance during prolonged GNSS-denied windows, developers fuse inertial systems with auxiliary sensor suites.
Terrain Referenced Navigation (TRN)
TRN utilizes active sensors to measure local surface elevation profiles and matches them against preloaded digital terrain elevation data maps. This correlation provides absolute position fixes that clamp INS drift errors without emitting or receiving external radio signals.
Visual Navigation Systems
By leveraging rugged optical cameras combined with edge-computing vision algorithms, visual navigation tracks landmarks and features across the local landscape. Fusing optical flow calculations with the INS provides an exceptional method for verifying relative velocity and distance traveled, particularly in cluttered urban or forested theaters.
LiDAR-Based Navigation
LiDAR sensors emit laser pulses to build a highly accurate, 3D point-cloud representation of the vehicle’s surroundings. When integrated alongside the inertial data stream, LiDAR simultaneous localization and mapping (SLAM) techniques deliver highly accurate navigation capability through environments where visibility is poor or traditional optical tracking is degraded.
Wheel Odometry Integration
Wheel odometry tracks the physical rotations of the vehicle’s drivetrain via the CAN bus or external encoders. Though susceptible to errors caused by wheel slip, mud, and uneven terrain, fusing odometry data with the INS state engine gives the navigation computer a reliable velocity baseline that drastically reduces position drift over long distance transits.
Ruggedization & Design Considerations
Ensuring operational survivability requires ground vehicle navigation systems to meet stringent environmental, mechanical, and electrical standards.
Shock, Vibration, and Thermal Management (MIL-STD-810)
Military land assets are harsh environments for sensitive electronic components. Heavy cross-country travel, high-G track impact events, and weapon recoil produce structural stresses that can easily induce sensor noise or hardware failure.
Conformance to MIL-STD-810 requirements is commonly required for military ground vehicle programs. Systems employ internal mechanical isolation, ruggedized enclosures, and extensive finite-element-analyzed mounting brackets to dampen external forces. Furthermore, internal sensors are thermally managed via calibrated heating elements or precision heat sinks to guarantee that fluctuating temperatures in desert or arctic deployments do not alter sensor bias stability.
EMI and EMC Design Challenges (MIL-STD-461 and MIL-STD-1275)
The electromagnetic profile inside a modern tactical vehicle is incredibly dense, packed with high-power combat net radios, active radar systems, and counter-IED jammers.
MIL-STD-461 Compliance: Ensures that the INS is fully shielded against heavy electromagnetic interference (EMI) while generating negligible emissions that could interfere with other vital communication nodes.
MIL-STD-1275 Compliance: Guarantees that the power regulation circuitry of the navigation hardware can easily withstand the severe voltage surges, spikes, and cranking transients common to military vehicle DC power grids.
Environmental Resistance (Dust, Mud, Water, and Chemicals)
Combat equipment must survive continuous exposure to abrasive sand, thick mud, deep water crossings, and aggressive chemical, biological, radiological, and nuclear decontaminants. Military-grade INS assemblies feature high ingress protection (IP67 or IP68) ratings, utilizing heavy-duty hermetic seals, corrosion-resistant anodized aluminum structures, and military circular connectors to protect sensitive internal sensors and electronics.
Emerging Trends in Ground Vehicle INS
The landscape of military land navigation is shifting rapidly due to micro-engineering breakthroughs and open system mandates.
Next-Generation MEMS Sensors: Micro-Electro-Mechanical Systems have fundamentally changed the economics and footprint of tactical navigation, allowing high-precision in-vehicle MEMS INS solutions to deliver increasingly low bias instability and drift performance while reducing size, weight, power, and cost (SWaP-C).
MOSA and Open Architecture Navigation Systems: Modern defense acquisition policies mandate a Modular Open Systems Approach, utilizing standardized software protocols and modular physical layouts so field integrators can rapidly hot-swap underlying sensors or patch algorithms without a costly, ground-up redesign.
Autonomous Battlefield Mobility: The shift toward fully automated supply convoys and robotic combat vehicles demands 3D tactical inertial navigation configurations capable of resolving six degrees of freedom with high accuracy across complex terrain.
These interconnected advancements guarantee that next-generation ground assets retain a decisive technological edge in highly contested domains.
Advancing Defense Capability Through Strategic CollaborationDefense Advancement works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive defense capabilities forward.