Showcase your capabilities
If you design, build or supply Drone/UAV INS, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.



Drone Inertial Navigation Systems (INS) provide autonomous positioning, velocity estimation, and attitude determination for military and defense UAVs, enabling reliable navigation without continuous dependence on external signals.
This page showcases leading UAV INS suppliers offering solutions combining accelerometers, gyroscopes, and advanced sensor fusion technologies to support tactical drones, loitering munitions, and long-endurance platforms operating in contested environments.
Read the Technology Overview

Advanced Inertial Navigation Systems (INS) for Reliable Navigation in Challenging Operational Environments

Cutting-Edge Inertial Solutions for High-Accuracy Navigation & Positioning in GPS-Denied Environments
Advanced Solutions for Defense Modernization: Propulsion, Sensors, Communication & Augmented Reality Systems

Tactical Grade IMU, GPS/INS, Weapon Orientation Solutions

Advanced Navigation Solutions for Mission-Critical Defense & Aerospace Applications

State-Of-The-Art Flight Control & GNSS-Denied Navigation Technologies for Tactical UAV Platforms
High-Precision MEMS, Quartz & FOG Inertial Sensing Systems for Military, Aerospace & Defense Applications

High-Performance Fiber Optic, Ring Laser Gyro and MEMS Inertial Sensors & Navigation Systems

MEMS Inertial Sensors, Gyroscopes & Accelerometers for Inertial Guidance, Control & Stabilization

High-Performance Inertial Sensing & Navigation Systems for Military Land Vehicles & Ground Forces

MEMS-based Inertial Navigation Systems for Supporting Tactical Unmanned Operations in GPS-Denied Environments
If you design, build or supply Drone/UAV INS, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Drone Inertial Navigation Systems (INS) provide positioning, velocity estimation, attitude determination, and navigation continuity for military and defense unmanned aerial vehicles (UAVs). By calculating aircraft state vectors from onboard accelerometers and gyroscopes, an inertial navigation system for drones provides a self-contained navigation baseline that does not depend on external radio frequency signals.
The importance of drone inertial navigation has increased as electronic warfare threats have become more advanced. Modern operating environments may include Global Navigation Satellite System (GNSS) jamming, spoofing, meaconing, or denial affecting GPS, Galileo, GLONASS, and BeiDou signals. For unmanned aircraft conducting beyond visual line of sight (BVLOS) missions, intelligence gathering, deep-strike profiles, target acquisition, or maritime surveillance, resilient navigation is essential. While a UAV INS is commonly paired with GNSS receivers for accurate position initialization and periodic error correction, its core value is its ability to maintain navigation when external signals degrade or disappear.
An inertial navigation UAV architecture must be scaled to the size, mission profile, flight dynamics, and endurance requirements of the airframe.
Inertial navigation is a foundational capability across defense drones, but hardware selection varies by platform class:
Loitering munitions require highly responsive UAV inertial navigation system configurations. During terminal attack dives, evasive trajectories, or operation in electronic countermeasure zones, the internal IMU tracking loop provides high-rate angular data for steering and target engagement.
Naval drone operations introduce featureless, moving, and high-wind environments. Maritime unmanned platforms use INS data to support long-distance over-water tracking, stabilization, deck-relative navigation, and autonomous recovery on pitching warship flight decks.
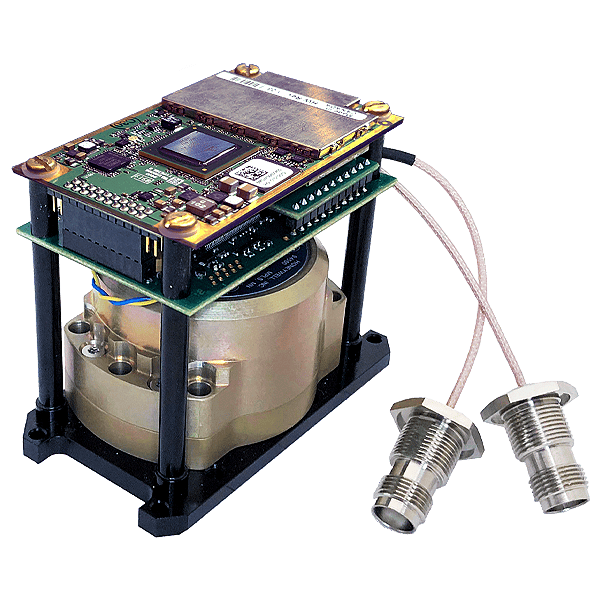
A drone inertial navigation system relies on a high-rate internal sensor suite that measures physical movement in three dimensions.
The Inertial Measurement Unit (IMU) is the sensing hub of the INS, containing orthogonal accelerometers and gyroscopes. IMU quality directly affects drift rate, heading stability, and navigation performance during GNSS outages:
Because pure dead reckoning experiences continually accumulating position error over time, modern military drone and UAV INS architectures use sensor fusion to constrain drift, validate movement, and maintain navigation accuracy during GNSS degradation or denial.
| Technology | How it Integrates with Drone INS |
| EO/IR Sensors | EO/IR sensors can be fused with UAV INS outputs to compare live optical or infrared imagery against inertial movement estimates. This helps verify ground-track movement, identify visual landmarks, and correct cross-track drift without emitting detectable signals. |
| LiDAR Systems | LiDAR provides 3D spatial data that can be fused with drone inertial navigation outputs for localization in complex environments. Integrated with an INS, it helps reduce positional drift and supports obstacle avoidance in urban terrain, canyons, or confined areas. |
| Radar-Aided Systems | Radar-aided navigation supplements a drone INS by measuring ground speed, altitude, and terrain-relative movement. These measurements provide correction data for the inertial solution during poor weather, obscurants, dust, smoke, or darkness. |
| Terrain Referenced Navigation (TRN) | TRN integrates radar or laser altimetry with a UAV INS by comparing measured terrain profiles against onboard digital elevation models. It provides a passive correction source for inertial drift, particularly for advanced autonomous systems, low-altitude cruise profiles, and long-range weapons. |
| Visual Odometry | Visual odometry uses sequential camera frames to estimate incremental motion and can be fused with IMU data inside the drone navigation filter. This helps reduce INS drift during GNSS dropouts by providing relative velocity and movement estimates from visible features. |
| SLAM | SLAM combines onboard sensing with inertial data to create a local map while estimating the UAV’s position within it. Integrated with a drone INS, it supports navigation in uncharted, indoor, subterranean, or GPS-denied environments. |
The high-rate output of an INS is distributed across flight, mission, and payload systems to support stable control and accurate mission execution.
INS telemetry provides the immediate feedback required by flight control computers and autopilots to command control surfaces, adjust motor outputs, and execute steering changes. Low-latency inertial updates help maintain stability during turbulence, wind shear, hover, launch, recovery, and sharp defensive maneuvers.
The mission computer blends IMU outputs with auxiliary sensor data using Extended Kalman Filters (EKF), non-linear filters, or other estimation methods. This produces a unified navigation solution that can remain usable even when GNSS updates become unreliable.
Most military UAVs combine inertial navigation with GNSS and other aiding sensors to improve long-term accuracy. Depending on mission requirements, architectures may use loose, tight, or deeply integrated sensor fusion to combine inertial measurements with satellite navigation, air data, visual navigation, radar, LiDAR, or other positioning sources. This allows platforms to maintain accuracy during partial signal degradation while preserving operational capability during GNSS outages.
ISR payloads require high-rate angular reference data to drive gimbal stabilization and maintain clear imagery during maneuvering. Accurate navigation and attitude data also support target georeferencing. Higher navigation and attitude accuracy directly reduce target location error (TLE), particularly at extended stand-off distances.
Drone swarms may use tactical data networks to share navigation data between platforms. Future collaborative navigation architectures may allow UAVs with more accurate positioning to assist nearby systems, helping maintain formation integrity and mission continuity in degraded navigation environments.
Inertial navigation systems for drones are increasingly being developed as part of broader resilient PNT architectures that combine onboard autonomy, alternative reference sources, and advanced processing techniques.
Together, these developments are moving UAV INS design toward multi-layered navigation architectures that can maintain mission continuity across contested, degraded, and GPS-denied environments.


 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.