Inertial Labs, a VIAVI Solutions Company, presents its Visual Inertial Navigation System (VINS) as an advancement of traditional inertial navigation, designed to support resilient autonomy in GNSS-denied and contested environments. Read more >>
As autonomous platforms are deployed more widely, the ability to maintain accurate positioning without reliable satellite input has become increasingly important. VINS builds on established Inertial Navigation System (INS) principles by incorporating visual data to improve positional accuracy and autonomy under challenging operational conditions, including GNSS jamming and spoofing.
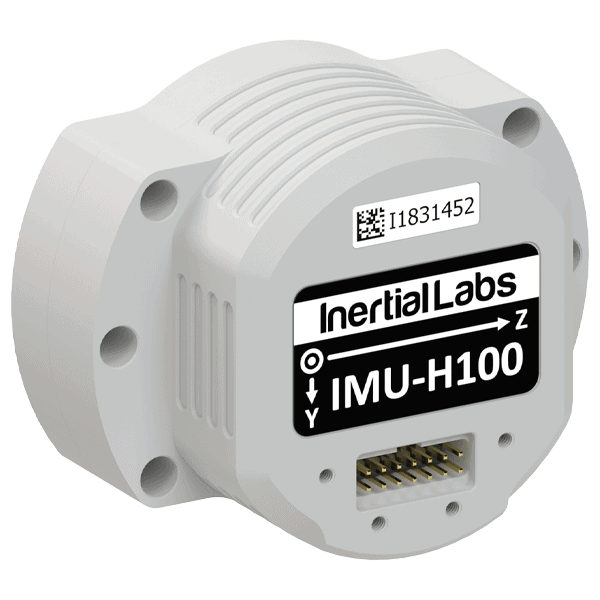
Conventional INS solutions rely on an Inertial Measurement Unit (IMU), combining gyroscopes, accelerometers, and magnetometers with GNSS data to determine position, velocity, and attitude. While effective in GNSS-available environments, these systems accumulate positional drift over time when satellite signals are unavailable.
VINS addresses this limitation by adding visual odometry as an additional input. A ground-facing camera observes surface features and tracks identifiable points as they shift between frames, enabling the system to calculate velocity with high precision. This data is integrated into INS algorithms as a correction source, reducing drift and improving positional accuracy.
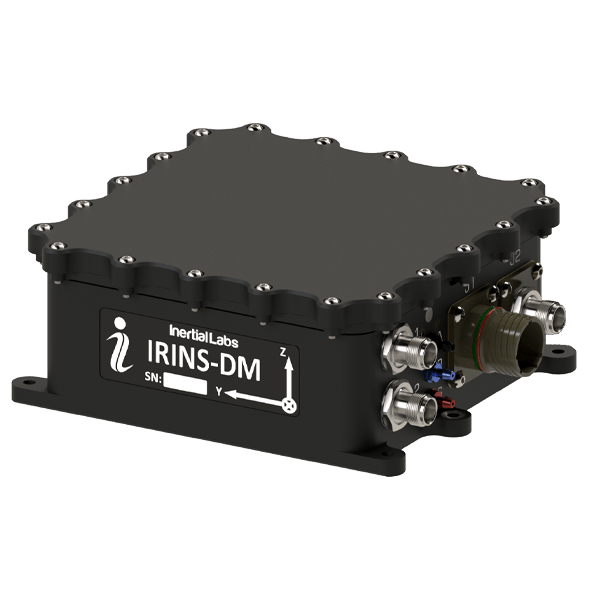
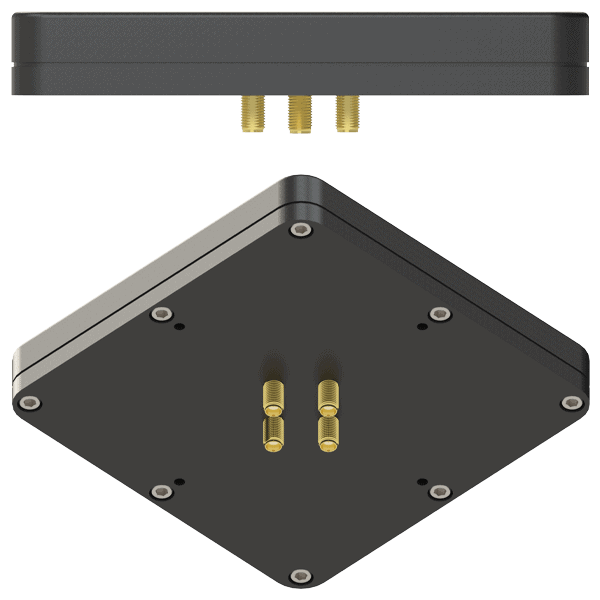
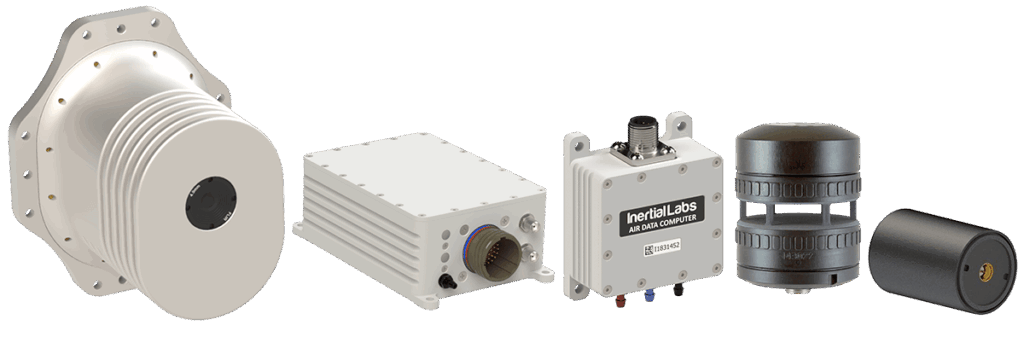
The system is structured as a modular architecture consisting of a processing module, a sensor module, and an optional air data source. The processing unit performs sensor fusion and navigation calculations, while the sensor module combines inertial components with a specialized camera for terrain observation.
Platform-specific inputs may include an air data computer for fixed-wing Unmanned Aerial Vehicles (UAVs) or a digital wind speed sensor for multirotor systems. This approach allows integration across different UAV configurations while maintaining a unified filtering and calibration framework.
VINS is delivered as a fully integrated solution rather than a combination of separate subsystems. By embedding visual odometry within the navigation architecture, it removes the need for external camera-based velocity sensors and associated integration effort. The system can also interface with additional resilience technologies, including Controlled Reception Pattern Antennas (CRPA), Software Defined Radio (SDR) solutions, and advanced GNSS receivers, enabling broader navigation resilience without requiring fundamental redesign.
Optimized for aerial platforms where continuous ground observation is possible, VINS has been deployed on small aircraft and Vertical Take-Off and Landing (VTOL) systems. It is not intended for marine or subsurface use and does not rely on map-based localization. Instead, it enhances inertial performance through camera-derived motion data, improving drift control and positional stability during GNSS outages. Ongoing development is focused on expanding the use of visual data and refining algorithms, with future potential for AI-assisted processing to improve robustness across varying environmental conditions.