Marine Inertial Navigation Systems (INS) provide autonomous positioning, velocity, heading, attitude, and motion data without dependence on external RF or satellite signals. Used across naval vessels, submarines, Unmanned Surface Vessels (USVs), Autonomous Underwater Vehicles (AUVs), and Remotely Operated Vehicles (ROVs), these systems support assured navigation in GNSS-denied and contested environments.
This page showcases leading marine INS suppliers delivering the high-rate motion and orientation data required for sensor stabilization, fire control, combat systems integration, dynamic positioning, and autonomous operations.
If you design, build or supply Marine Inertial Navigation Systems (INS), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
LEO-aided inertial navigation system for A-PNT in D3SOE operations
LEO-aided inertial navigation system for A-PNT in D3SOE operations
IRINS from Inertial Labs, a VIAVI Solutions Inc. company, is a Low Earth Orbit (LEO)-aided Inertial... ...ous and secure navigation and timing data without reliance on GNSS. The device includes an embedded...
OEM dual-antenna GNSS-INS with Honeywell HG4930 IMU
OEM dual-antenna GNSS-INS with Honeywell HG4930 IMU
The Inertial Labs GPS-Aided InertialNavigationSystem(INS-DH-OEM) is an OEM version of the new... ...NSS-aided MEMS inertialnavigationsystem in an OEM form factor, featuring an advanced NovAtel...
FOG AHRS & INS for GPS-denied navigation & resilient heading
FOG AHRS & INS for GPS-denied navigation & resilient heading
...ding Reference System (AHRS) and InertialNavigationSystem(INS) engineered for military... ...as 50 supports navigation in GNSS-denied or degraded scenarios and provides sensor outputs suitable...
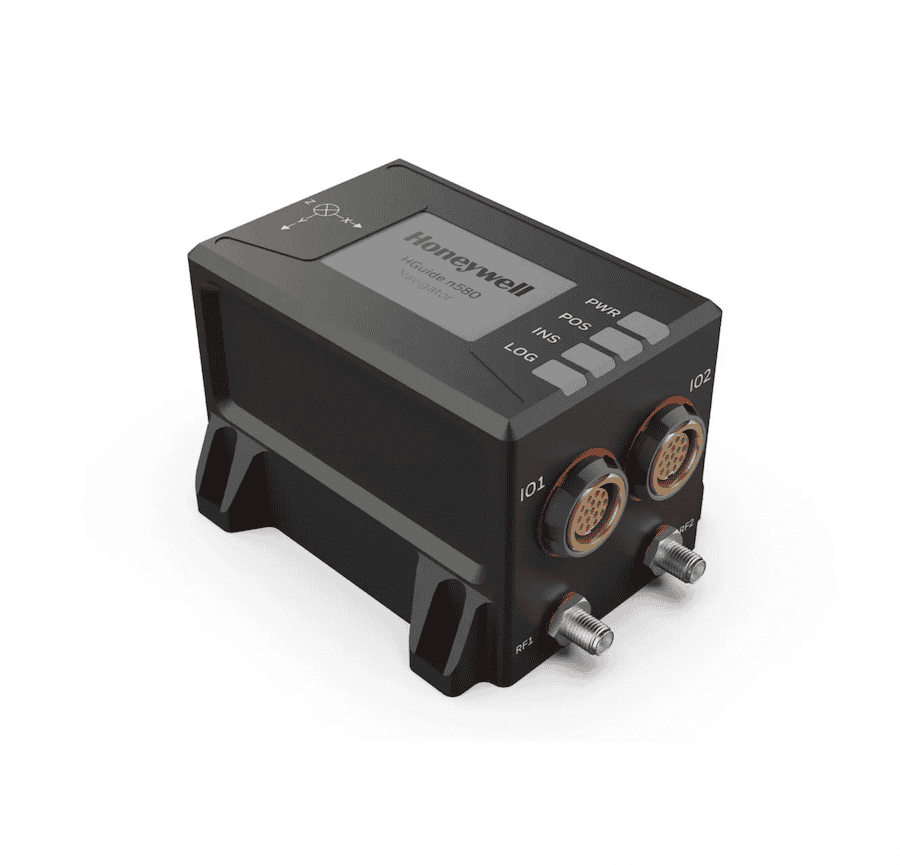
Marine inertial navigation system (INS) & global positioning system (GPS)
Marine inertial navigation system (INS) & global positioning system (GPS)
...dable maritime navigation, TALIN marineINS integrates both inertialnavigationsystem(INS) and... ...eywell's TALIN MarineInertialNavigationSystem(MINS) is a highly accurate and shock-stabilized...
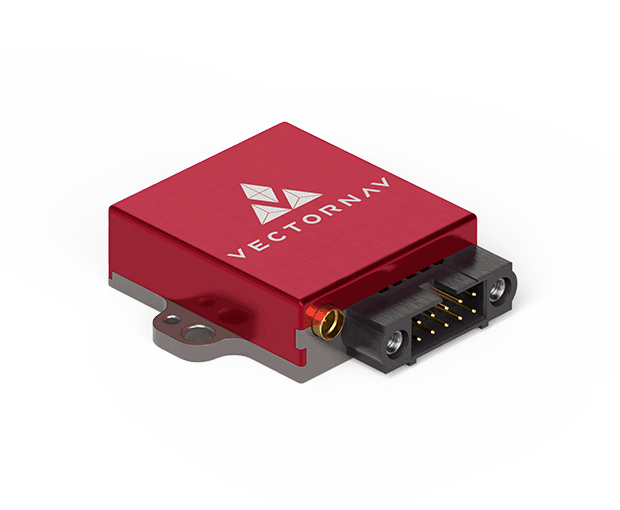
Combines with SPAN GNSS+INS technology providing 3D position, velocity and attitude
Combines with SPAN GNSS+INS technology providing 3D position, velocity and attitude
......actical grade Mems IMU enclosure for commercial and military guidance and navigation... ...ctromechanical Systems (MEMs) Gyros and RBA accelerometers. Our Synchronous Position, Attitude and...
Commercial MEMS IMU combines with SPAN GNSS+INS technology to deliver 3D position and velocity
Commercial MEMS IMU combines with SPAN GNSS+INS technology to deliver 3D position and velocity
...logies: Global Navigation Satellite System (GNSS) positioning and InertialNavigationSystems(INS).... ...ctromechanical System (MEMS) Inertial Measurement Unit (IMU) from Sensonor. It features low noise...
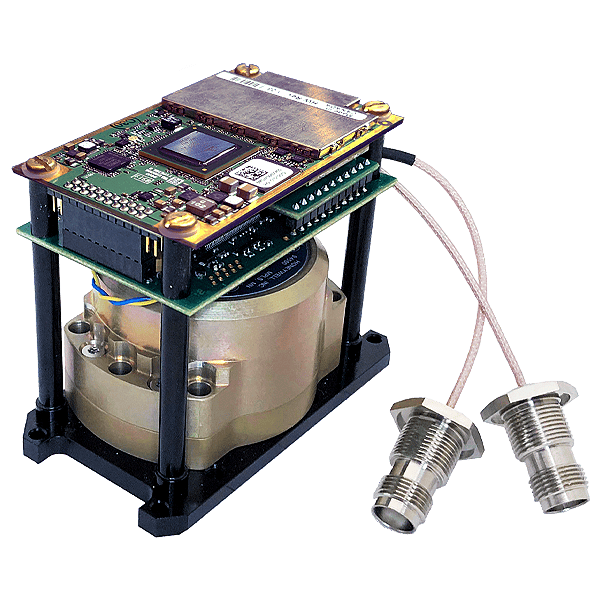
High-accuracy inertial navigation system for airborne, maritime and land platforms
High-accuracy inertial navigation system for airborne, maritime and land platforms
...s a ruggedised inertialnavigation unit built around a closed-loop fibre-optic gyroscope and... ... accelerometer system achieving accelerometer bias stability of ~10 µg....
...Tactical Grade System, engineered for high-quality performance in demanding military applications.... ...ry Quartz MEMS Inertial Sensors ensure continued position and attitude accuracy even if GPS tracking...
Marine Inertial Navigation Systems (INS): Technical Guide for Naval & Defense Systems Integrators
Overview by
William Mackenzie
Updated:
Introduction to Marine Inertial Navigation Systems (INS)
A marine Inertial Navigation System (INS) provides autonomous, continuous positioning, velocity, heading, attitude, and motion data without reliance on external RF or satellite signals. By processing linear acceleration and angular rotation via high-precision internal sensors, an inertial navigation system for marine applications calculates a vessel’s real-time kinematics.
For defense specifiers and system integrators, a ships inertial navigation system is a core component of modern naval navigation and Assured Positioning, Navigation, and Timing (A-PNT) architectures. In contested electromagnetic environments where Global Navigation Satellite Systems (GNSS) are routinely jammed, spoofed, or physically degraded, an INS ensures mission continuity across surface, subsea, and unmanned assets.
Applications of Marine INS Across Naval & Defense Operations
Naval surface combatants rely on the marine INS as a mission systems core to provide critical pitch, roll, heading, and heave data required to stabilize marine radars, align weapon systems, and feed Combat Management Systems (CMS). Additionally, high-speed interceptors and patrol boats experience extreme shock, vibration, and angular velocities, making high-rate inertial measurements vital for maintaining tracking fidelity during aggressive tactical maneuvers and severe sea states where satellite tracking loops often fail.
Unmanned & Autonomous Systems (UxV)
For Autonomous Underwater Vehicles (AUVs), the system enables robust underwater inertial navigation and operates as the primary navigation payload during submerged operations. Dead reckoning is commonly aided by Doppler Velocity Logs (DVLs) and acoustic positioning systems to reduce accumulated position error during long-duration transits when external signals are completely unavailable. Remotely Operated Vehicles (ROVs) utilize this motion telemetry for precise closed-loop vehicle control, subsea robotic manipulation, and sensor payload stabilization.
Meanwhile, Unmanned Surface Vessels (USVs) depend on a tightly integrated USV inertial navigation system as a core navigational backbone to drive autonomous route-following, obstacle avoidance algorithms, and payload deployment sequences.
Submarines must operate with absolute covertness and without GNSS access for extended periods, demanding an ultra-high-performance submarine inertial navigation system that minimizes drift accumulation between external position updates. In active electronic warfare environments characterized by intense GNSS denial or spoofing, the completely passive nature of inertial sensing guarantees uncompromised navigation integrity without broadcasting detectable signals.
Anti-Submarine Warfare (ASW) & Fire Control Support
Anti-submarine warfare platforms utilize INS data for real-time motion compensation to stabilize hull-mounted, dipped, or towed-array sonars, effectively eliminating the acoustic blurring caused by vessel wave action. Furthermore, the INS feeds high-frequency attitude and heading data directly into fire control computers for naval artillery, guided missiles, torpedoes, and Remote Weapon Stations (RWS) to improve fire control accuracy and increase first-round hit probability during dynamic engagements.
Maritime Navigation Integration & Sensor Fusion
Modern naval architectures utilize a multi-sensor approach, embedding a high-performance marine GNSS INS receiver or integrated solution into a tightly or deeply coupled sensor fusion framework (typically an Extended Kalman Filter) to bound inherent inertial drift.
Secondary Navigation Sensor
How It Interfaces & Interacts with the INS
Typical Domain
GNSS
Delivers absolute position and velocity vectors (via NMEA or binary logs over Ethernet/Serial) to the marine INS Kalman filter. The INS uses these data points to estimate and correct internal sensor biases, bounding accumulated inertial position errors.
Surface Only
Doppler Velocity Log (DVL)
Transmits ground-speed or water-speed velocity vectors (typically via RS-232/485) directly into the subsea inertial navigation system. The navigation filter uses this relative velocity to substantially reduce position drift during submerged operations.
Subsea (AUV / ROV / Submarines)
Acoustic Positioning (USBL / LBL / SBL)
Injects periodic georeferenced coordinates or acoustic range/bearing data into the subsea INS navigation filter via acoustic telemetry links. These external updates reset the underwater accumulated drift error at defined intervals.
Subsea Operations
Radar & Sonar Systems
These subsystems act as consumers of INS data; the INS streams low-latency pitch, roll, and heading data packets (via high-speed synchro, serial, or network buses) to the radar/sonar processors. This allows target tracking algorithms to accurately transform sensor measurements into the appropriate navigation reference frame.
Surface & Subsurface
Dynamic Positioning (DP)
The INS feeds continuous, high-frequency heave, pitch, and roll data streams into the DP controller to improve vessel motion compensation and station-keeping performance.
Logistics & Surface Combatants
ECDIS / WECDIS
Receives standard navigation sentences (e.g., NMEA 0183/NMEA 2000) from the INS, overlaying the vessel’s true position, true heading, and speed vectors directly onto digital warship charts for real-time situational awareness.
Fleet-wide
Military Standards, Construction & Environmental Certification
Naval deployment demands compliance with stringent environmental and electrical survivability standards:
MIL-STD-810 (Environmental Engineering): Systems undergo rigorous qualification testing for thermal cycling, operational humidity, altitude extremes, and high-salinity salt fog resistance to eliminate the risk of premature galvanic or atmospheric corrosion.
Naval Shock Standards (MIL-S-901): Combat platforms face high-impact mechanical stress from wave pounding, heavy caliber gun discharge, and underwater hull explosions. Marine INS enclosures rely on internal shock isolation mounts and reinforced structural chassis to preserve precision sensor alignment.
Electromagnetic Compatibility (MIL-STD-461 / NATO STANAG): Naval vessel superstructure layouts feature densely packed, high-power emitters (radar arrays, tactical communications, EW jammers). The INS enclosure must feature high electromagnetic immunity (EMC) and low emissions to prevent interference with surrounding equipment.
Corrosion Protection & Sealing (IEC 60945): Utilizes marine-grade alloys, specialized anodization, chemical-resistant powder coatings, and hermetically sealed connectors (IP67/IP68) to prevent degradation from saltwater exposure.
Deep-Sea Pressure Resistance: For AUVs and deep-submergence systems, the INS or its outer housing may be engineered for operation at depths ranging from hundreds to several thousand meters, depending on the housing design and application, without mechanical deflection affecting sensor calibration metrics.
Emerging Trends in Marine INS Technology
As naval platforms become increasingly autonomous and operate in more contested environments, marine INS development is focused on reducing drift, improving SWaP-C characteristics, and expanding sensor fusion capabilities. Advances in MEMS technology, AI-assisted navigation algorithms, and deeper integration with DVL, acoustic positioning, and alternative PNT sources are helping to enhance navigation resilience across manned and unmanned maritime systems. As a result, the marine inertial navigation system is expected to remain a foundational component of future naval navigation, autonomous maritime operations, and assured navigation architectures in GNSS-denied environments.
Advancing Defense Capability Through Strategic CollaborationDefense Advancement works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive defense capabilities forward.