Source and compare suppliers and manufacturers of underwater inspection systems built for defense applications. These robots and vehicles enable teams to assess submerged structures, identify threats, and support search-and-recovery operations, delivering high-quality imagery and sensor data in hazardous or inaccessible environments.
If you design, build or supply Underwater Inspection Craft, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
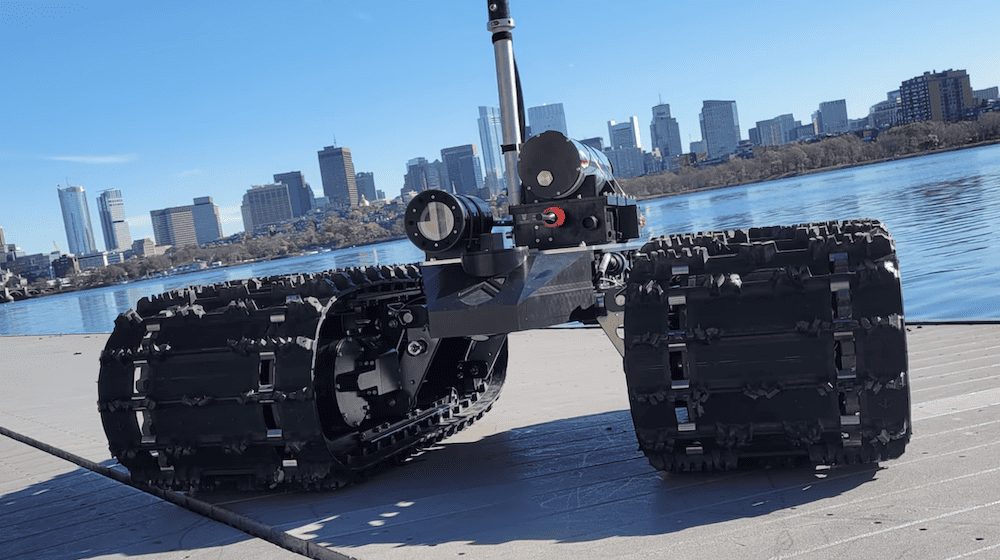
Largest military crawler robot for harshest conditions with maximum payload capacity
Largest military crawler robot for harshest conditions with maximum payload capacity
......igned for military land, littoral and underwater operations in a range of challenging conditions.... ..., littoral and underwater operations in a range of challenging conditions. Designed to be...
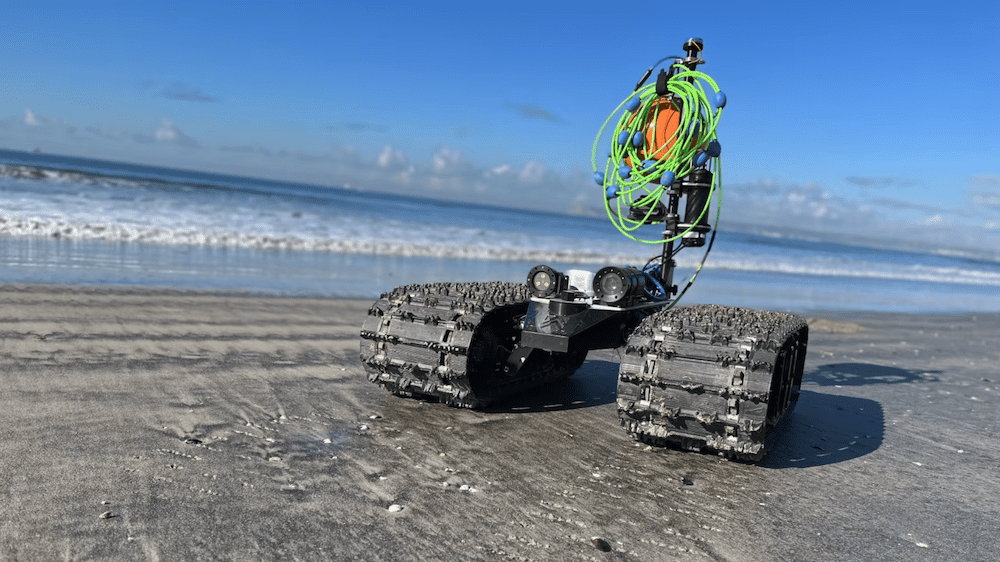
Highly portable amphibious robot for lighter payloads
Highly portable amphibious robot for lighter payloads
......igned for military land, littoral and underwater operations in a range of challenging conditions.... ..., littoral and underwater operations in a range of challenging conditions. Designed to be...
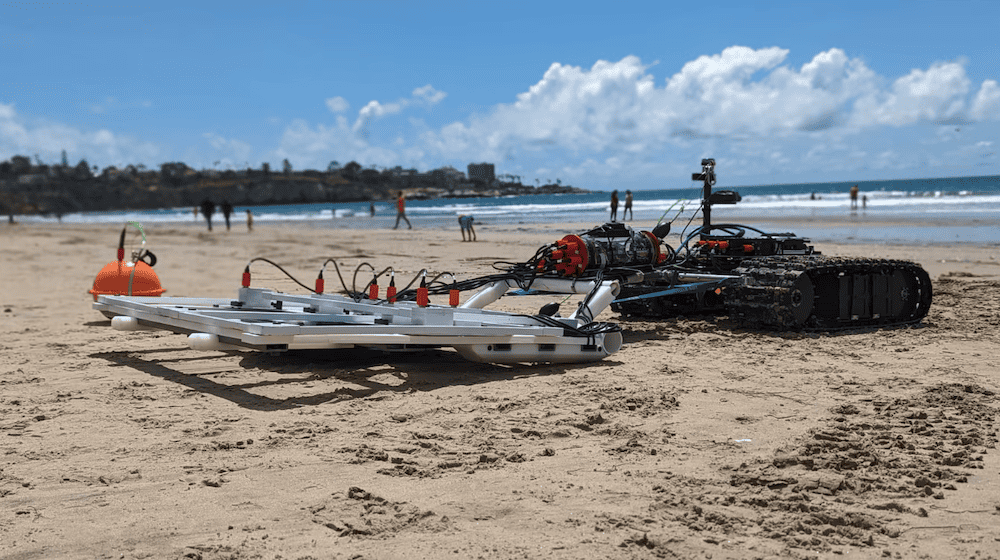
Mid-range amphibious tracked vehicle for nearshore, estuarine and inland environments
Mid-range amphibious tracked vehicle for nearshore, estuarine and inland environments
......igned for military land, littoral and underwater operations in a range of challenging conditions.... ..., littoral and underwater operations in a range of challenging conditions. Designed to be...
Defense forces use underwater drone inspection to observe, evaluate, and document submerged environments with limited visibility or restricted access. These include ports, harbors, subsea cables, underwater infrastructure, and ship hulls. The platforms involved range from tethered remotely operated vehicles (ROVs) to tracked crawlers and autonomous robotic systems. Defense users rely on this technology for mission-specific tasks where real-time situational awareness or post-mission analysis is required.
Most underwater inspection systems are outfitted with configurable payloads such as sonar, video cameras, magnetometers, and navigation instruments. Depending on operational needs, vehicles can be equipped with robotic arms, tether management systems, or modular battery units to enhance performance. Some models can operate on the surface and submerged, adapting to varying terrain and mission scope.
Defense Applications of Underwater Inspection Systems
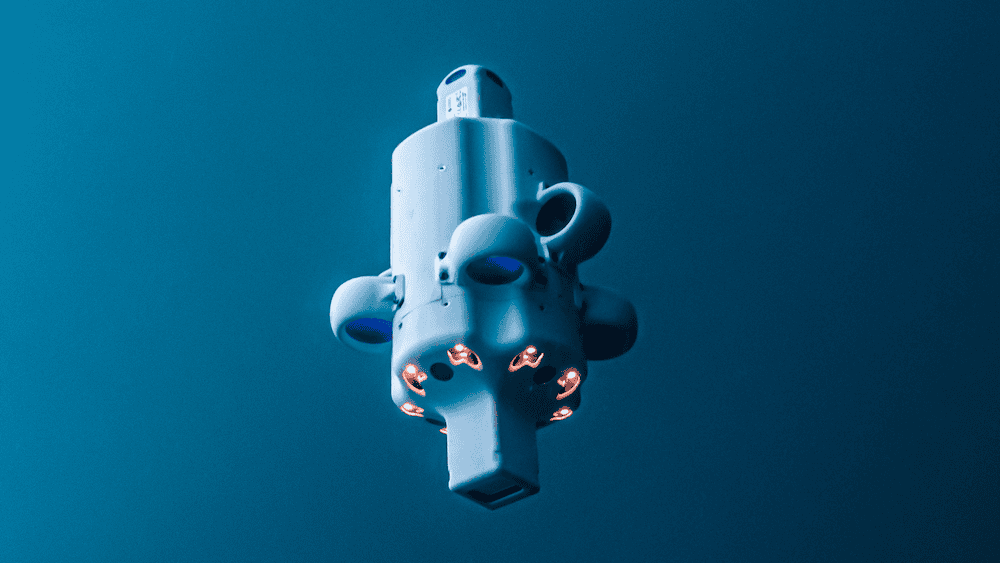
Hydrus Autonomous Underwater Inspection Vehicle by Advanced Navigation
Inspection technologies serve multiple functions across naval, joint, and expeditionary defense operations. These include:
Search and Recovery: Used to locate sunken equipment, downed aircraft, or remains following maritime incidents. Search patterns can be pre-programmed or operator-guided.
Threat Identification: Deployed to inspect unknown or potentially hazardous objects attached to ship hulls, piers, or seabed installations.
Infrastructure Monitoring: Applied in routine and situational assessments of military port facilities, subsea cables, and dam walls.
Underwater Forensics: Used to document submerged crime scenes or impact sites with high-fidelity sensors and imaging.
Security Inspections: Employed in detecting unauthorized access points, hull breaches, or physical anomalies in security zones.
Maintenance Evaluation: Facilitates condition assessments for naval assets and underwater structures without interrupting operations.
These functions reduce operational delays, mitigate diver exposure, and contribute to accurate threat assessment and asset maintenance workflows.
Types of Underwater Inspection Platforms
Several categories of underwater platforms are used depending on depth, terrain, and mission profile:
Inspection ROVs
Bayonet 350 inspection vehicle by Greensea IQ
Remotely operated vehicles (ROVs) are tethered submersible platforms piloted from a surface station. Inspection-class ROVs are typically lightweight and compact, capable of maneuvering in confined or debris-laden spaces. They may include sonar, manipulator arms, and high-resolution cameras. ROVs are frequently used in hull inspections, harbor sweeps, and structural assessments of submerged infrastructure.
Inspection Robots
Autonomous or semi-autonomous underwater robots are configured for pre-planned survey missions or condition monitoring. These units generally include onboard power systems, navigation modules, and sensor arrays. They are suitable for covering larger areas where direct tethered control is impractical, such as route surveys, reconnaissance of minefields, or persistent monitoring of subsea installations.
Amphibious Tracked Vehicles
Tracked vehicles with amphibious capabilities operate on land and underwater, supporting tasks in intertidal zones and shallow water environments. These platforms are deployed for inspecting bridge foundations, port structures, and shallow dams. Their design enables mobility across uneven underwater terrain and onto dry surfaces without requiring redeployment.
Underwater Crawlers
These vehicles adhere to surfaces using magnets or suction, allowing detailed inspection of vertical structures like hulls and dam walls. Crawlers provide stable movement along fixed surfaces and can operate in strong currents or low-visibility zones. They are often fitted with sensors, lights, and video systems for detailed asset examination.
System Components and Capabilities
Each underwater inspection system integrates a combination of mechanical, optical, acoustic, and electronic subsystems, including:
Bayonet 250 subsea inspection by Greensea IQ
Navigation Systems: Inertial navigation systems (INS), acoustic positioning (USBL), and Doppler velocity logs (DVL) are used for real-time location tracking in environments without GPS.
Sensor Payloads: These may include imaging sonar, acoustic sensors, laser scanners, pressure sensors, and magnetometers to gather multidimensional data about the environment and structures.
Mobility and Propulsion: Thrusters, tracks, or hybrid propulsion systems support movement through water or across the seafloor. Some vehicles include active buoyancy modules to adjust depth.
Visual Inspection Tools: Cameras (monochrome, color, low-light), laser line scanners, and LED illumination support documentation in turbid or low-visibility environments.
Manipulation Systems: Robotic arms, manipulators, and graspers can be added for interaction with underwater objects or physical sampling.
Communication and Power: Vehicles may be powered through umbilicals or internal batteries, and use communication modems or fiber optics for data transfer to the control station.
Data Recording: Onboard loggers and data recorders allow offline analysis, while real-time telemetry enables live decision-making during missions.
Relevant Military and Industry Standards
Underwater inspection equipment used in defense applications must conform to engineering and operational standards that ensure reliability, safety, and interoperability. These include:
MIL-STD-810: Details testing procedures for environmental stresses, including temperature extremes, saltwater corrosion, and underwater pressure conditions.
MIL-STD-1474 and MIL-STD-461: Address noise limits and electromagnetic compatibility relevant to naval and subsea systems.
STANAG 1364: Establishes interoperability requirements for ROVs and subsea systems within NATO operations.
IMCA R 002 / R 004: Guidelines on the safe operation, certification, and maintenance of remotely operated and autonomous vehicles in industrial and defense sectors.
IEEE 1451: Provides a standardized interface for connecting sensors and transducers to data acquisition systems.
Operational Comparisons and Considerations
Compared to diver-based inspections, robotic underwater platforms provide longer operational duration, higher repeatability, and enhanced safety. Limitations may include physical access in highly confined spaces or the need for skilled operators and logistics support. These platforms can significantly enhance data accuracy and mission safety when combined with diver-led operations.
Key operational trade-offs include:
Mobility vs Stability: Free-swimming ROVs and UUVs (unmanned underwater vehicles) offer more exhaustive coverage but may be more affected by current than tracked crawlers.
Autonomy vs Control: Autonomous units reduce human involvement but require pre-mission planning and robust fail-safes.
Sensor Load vs Endurance: Higher sensor payloads may reduce mission duration due to increased power consumption and drag.
Selecting the appropriate inspection platform depends on specific mission parameters, available deployment infrastructure, and environmental factors.
Emerging Trends in Underwater Inspection for Defense
Technological advancements are influencing next-generation underwater inspection capabilities. Current areas of development include:
Distributed Sensing: Deployment of coordinated micro ROVs or mini ROVs that conduct parallel inspections with shared control systems.
AI-Driven Analytics: Onboard processing for object recognition, structural anomaly detection, and mission planning adjustments.
Advanced Energy Systems: Improved battery chemistries and hybrid power modules to extend underwater endurance and sensor uptime.
Integrated Communication: Use of cross-domain communication modems to link underwater systems with UAVs and surface vessels for unified situational awareness.
Compact Modular Designs: Emphasis on easily deployable, modular inspection units that can be reconfigured for multiple mission types with minimal hardware changes.
As underwater inspection continues to evolve, defense operators are incorporating these technologies into broader maritime security frameworks, including mine countermeasures, underwater surveillance, and infrastructure protection.
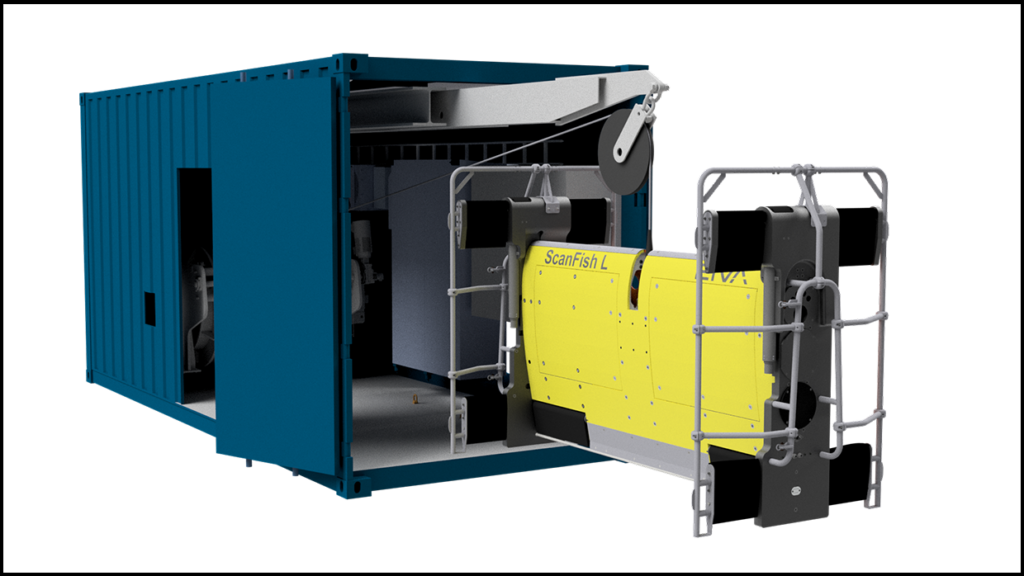
New service agreements for Slocum gliders and Gavia AUVs trigger investment in dedicated maintenance facilities and specialized field support staff across the South Coast
Greensea IQ has appointed Neotek as its exclusive representative in France and Belgium, expanding European access to its Bayonet AUGVs and IQNS systems for maritime and defense operations
After successful contracts for the Bayonet AUGV with the US Navy, US Marine Corps, and foreign militaries, Greensea IQ has closed a record-breaking year of growth in 2024
VideoRay’s MK20 Defender, a highly robust, man portable ROV, will be delivered to the U.S. Navy’s Maritime Expeditionary Standoff Response (MESR) for underwater explosive disposal
The Unexploded Ordnance survey demonstrated the power and flexibility of Greensea’s OPENSEA to rapidly integrate and deploy a new sensor suite for the task while showcasing the capabilities of the Bayonet 250 Autonomous UGV
Greensea Systems will present its marine robotic software solutions for defense applications at Combined Naval Event 2023, the flagship naval and maritime exhibition taking place 23-25 May in Farnborough, UK
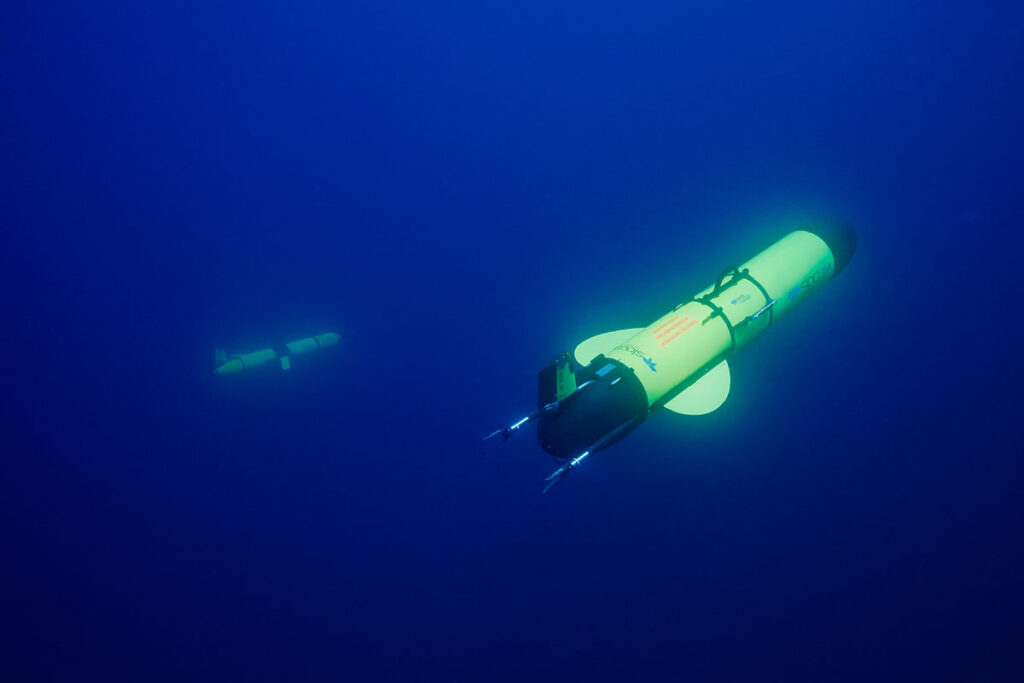
BlueWhale Autonomous Underwater Vehicle (AUV) performs covert intelligence-gathering above the sea surface, can detect submarines, underwater targets and gather acoustic intelligence, and also search for and detect naval mines
The demonstration at Ocean Business 2023 will include showing the Bayonet 250 underwater ground vehicle’s autonomous capability, and over-the-horizon command and control technology provided by Greensea Systems
Mar 28, 2023
Advancing Defense Capability Through Strategic Collaboration
Defense Advancement works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive defense capabilities forward.