Precyzyjne systemy sterowania ruchem regulują ruch kluczowych elementów na nowoczesnych platformach obronnych, od platform stabilizowanych i wieżyczek uzbrojenia po wysokowydajne powierzchnie sterujące lotem. Systemy te wykorzystują wzmocnione sterowniki, zaawansowane siłowniki oraz systemy sprzężenia zwrotnego w pętli zamkniętej, aby zapewnić dokładność rzędu poniżej milimetra oraz dynamiczną responsywność.
Najnowocześniejsze technologie bezzałogowych statków powietrznych (UAV) dla głównych dostawców sektora obronnego, producentów dronów oraz integratorów systemów
Jeśli projektujesz, budujesz lub dostarczasz Systemy sterowania ruchem, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
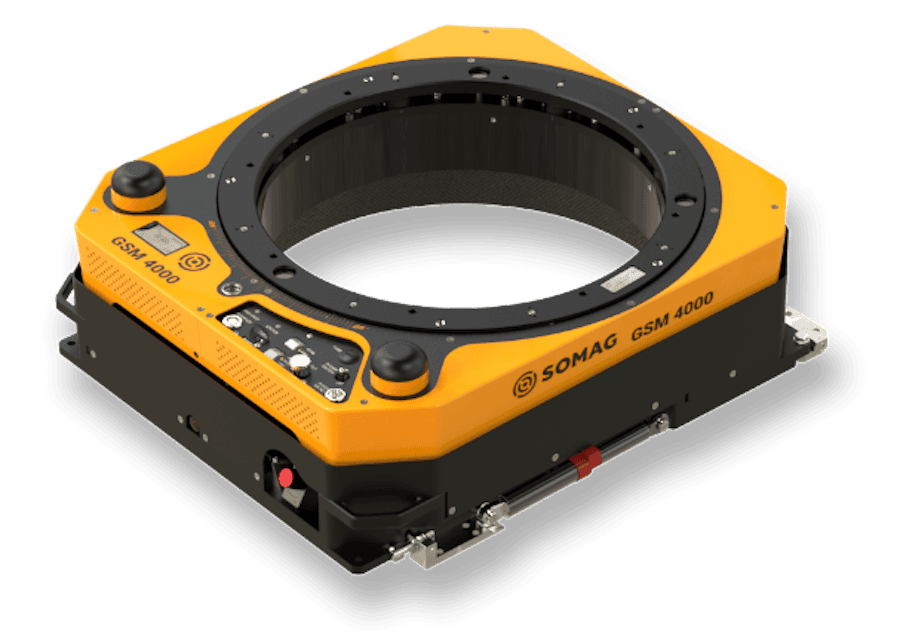
Systemy sterowania ruchem stanowią precyzyjny, skoordynowany kręgosłup nowoczesnych platform obronnych. Sterują one ruchem elementów mechanicznych poprzez połączone wykorzystanie wzmocnionych kontrolerów, czujników, siłowników oraz zaawansowanych pętli sprzężenia zwrotnego. Od mechanizmów serwo, które ustawiają zaawansowane anteny radarowe, po stabilizatory utrzymujące zasobniki celownicze o wysokiej rozdzielczości na szybko poruszającym się celu, systemy sterowania ruchem zapewniają dokładność, powtarzalność i natychmiastową reaktywność w zastosowaniach obrony powietrznej, lądowej, morskiej i kosmicznej.
Typowy kontroler ruchu klasy obronnej łączy w sobie wysokowydajną elektronikę, algorytmy sterowania w czasie rzeczywistym oraz wzmocnione siłowniki zaprojektowane tak, aby działały niezawodnie w najtrudniejszych warunkach, takich jak silne wibracje, ekstremalne temperatury i silne zakłócenia elektromagnetyczne (EMI). Systemy te są niezbędne wszędzie tam, gdzie precyzyjna kontrola położenia oraz płynny, deterministyczny ruch stanowią wymagania o znaczeniu krytycznym dla misji.
Kluczowa rola precyzyjnego sterowania ruchem we współczesnych zastosowaniach wojskowych
W sektorze obronnym precyzyjne sterowanie ruchem przekłada się bezpośrednio na decydującą skuteczność misji. Niezależnie od tego, czy chodzi o stabilizację czujników na platformie dynamicznej, sterowanie powierzchniami sterowymi samolotu o wysokich osiągach, czy też pozycjonowanie systemu uzbrojenia, zdolność do osiągnięcia dokładności rzędu poniżej milimetra oraz wysokiej dynamicznej responsywności w warunkach bojowych ma kluczowe znaczenie. Te wojskowe systemy sterowania ruchem stanowią podstawę szerokiego wachlarza zastosowań w dziedzinie obronności, w tym precyzyjnego namierzania celów, nawigacji, nadzoru, robotyki oraz obsługi ładunku. Każde z nich wymaga deterministycznego działania w czasie rzeczywistym oraz wbudowanej odporności na awarie.
Podstawowe zasady: uruchamianie, sprzężenie zwrotne i sterowanie w pętli zamkniętej
Sercem każdego rozwiązania w zakresie ruchu w sektorze obronnym jest system sterowania ruchem w pętli zamkniętej. Czujniki nieustannie mierzą położenie, prędkość lub moment obrotowy, przekazując dane z powrotem do sterownika, który natychmiast dostosowuje działanie siłownika w celu zminimalizowania błędu. Ta pętla sprzężenia zwrotnego zapewnia, że system utrzymuje precyzyjną trajektorię i stabilność, nawet w obliczu znacznych zakłóceń zewnętrznych. Zaawansowane algorytmy sterowania, takie jak PID, sterowanie adaptacyjne i predykcyjne, mają kluczowe znaczenie dla umożliwienia nowoczesnym systemom sterowania ruchem klasy wojskowej utrzymania najwyższej wydajności pomimo zmiennych obciążeń lub dynamicznych warunków środowiskowych.
Podstawowe komponenty systemów sterowania ruchem w sektorze obronnym
1. Sterowniki i procesory: mózg systemu
Scentralizowane a rozproszone sterowanie ruchem
Architektury scentralizowane wykorzystują pojedynczy sterownik do zarządzania wieloma siłownikami, oferując uproszczoną koordynację, ale zwiększając obciążenie obliczeniowe. Natomiast systemy rozproszone umieszczają przetwarzanie bliżej poziomu siłowników, co znacznie zmniejsza opóźnienia i poprawia odporność systemu. Podejście to jest szczególnie odpowiednie dla platform autonomicznych i złożonych systemów robotycznych, gdzie konieczne jest szybkie, lokalne podejmowanie decyzji.
Integracja z systemami misji
Kontrolery ruchu stosowane w sektorze obronnym ściśle współpracują z głównymi komputerami misji oraz systemami zarządzania pojazdami, aby płynnie dostosować ruch platformy do szerszych celów operacyjnych. Wykorzystanie systemów operacyjnych działających w czasie rzeczywistym oraz deterministycznych wojskowych sieci Ethernet gwarantuje, że krytyczne sygnały zwrotne i polecenia spełniają rygorystyczne wymagania czasowe niezbędne do wycelowania broni lub ustawienia czujników.
Wbudowane architektury sterowania
Kontrolery klasy obronnej często wykorzystują cyfrowe procesory sygnałowe (DSP) do sterowania z dużą prędkością, programowalne sterowniki logiczne (PLC) do sekwencjonowania deterministycznego oraz układy FPGA (Field-Programmable Gate Arrays), gdy wymagane są ultra niskie opóźnienia i rekonfigurowalne interfejsy. Warto zauważyć, że sterowanie oparte na układach FPGA staje się coraz bardziej powszechne w modułowych systemach o otwartej architekturze, zgodnych z podejściem MOSA (Modular Open Systems Approach) amerykańskiego Departamentu Obrony oraz specyfikacjami technicznymi SOSA (Sensor Open Systems Architecture).
2. Siłowniki i technologie napędowe: siła napędowa systemu
Hydraulika, elektryka i przejście na EMA
Siłownik DA 30-MCCS firmy Volz Servos
Chociaż tradycyjne układy hydrauliczne nadal znajdują zastosowanie w napędach o dużej wytrzymałości, gdzie wymagana jest maksymalna gęstość siły, takich jak podwozia samolotów lub wieżyczki pojazdów opancerzonych, w branży obserwuje się silny i aktywny trend w kierunku siłowników elektromechanicznych (EMA) oraz hybrydowych układów elektrohydraulicznych. Siłowniki EMA są coraz bardziej preferowane ze względu na czystszą pracę, mniejsze wymagania konserwacyjne oraz doskonałą cyfrową sterowalność, co wspiera ogólnobranżowe przejście na całkowicie elektryczne platformy obronne.
Silniki serwo i krokowe
Sterownik ruchu serwomechanizmu prądu stałego Rayon 135 firmy Redler Technologies
Silniki serwo stanowią podstawę precyzyjnych układów napędowych, zapewniając ciągłą kontrolę położenia przy wysokim stosunku momentu obrotowego do masy. Doskonale nadają się do zaawansowanych stabilizowanych gimbali, nowoczesnych systemów antenowych oraz powierzchni sterujących lotem. Silniki krokowe zapewniają solidną kontrolę przyrostową w zastosowaniach, w których dopuszczalne jest proste pozycjonowanie w pętli otwartej, takich jak precyzyjne mechanizmy optycznego wyrównywania w specjalistycznych systemach sterowania ruchem kamery lub mechanizmy koła filtrującego wewnątrz modułów ISR.
Zaawansowane typy silników
Silniki bezszczotkowe prądu stałego (BLDC) zapewniają doskonałą wydajność, mniejsze zużycie i minimalną sygnaturę elektromagnetyczną, co czyni je bardzo korzystnymi w przypadku platform stealth oraz bezzałogowych statków powietrznych (UAV) o długim zasięgu. Z kolei silniki liniowe eliminują mechaniczne elementy przekładni, zapewniając bezpośrednie systemy sterowania ruchem liniowym, umożliwiające szybki i pozbawiony drgań ruch.
3. Czujniki i urządzenia sprzężenia zwrotnego: system wykrywa
Sprzężenie zwrotne położenia
Czujniki położenia o wysokiej rozdzielczości, enkodery i resolwery mają fundamentalne znaczenie dla sprzężenia zwrotnego położenia, przekształcając ruch mechaniczny w precyzyjne sygnały cyfrowe. W trudnych warunkach środowiskowych enkodery magnetyczne i optyczne muszą być wzmocnione, ekranowane i uszczelnione, aby spełniały rygorystyczne kryteria trwałości normy MIL-STD.
Jednostki IMU i sterowanie dynamiczne
Żyroskopy dwu- i trójosiowe (TAG) firmy Inertial Labs
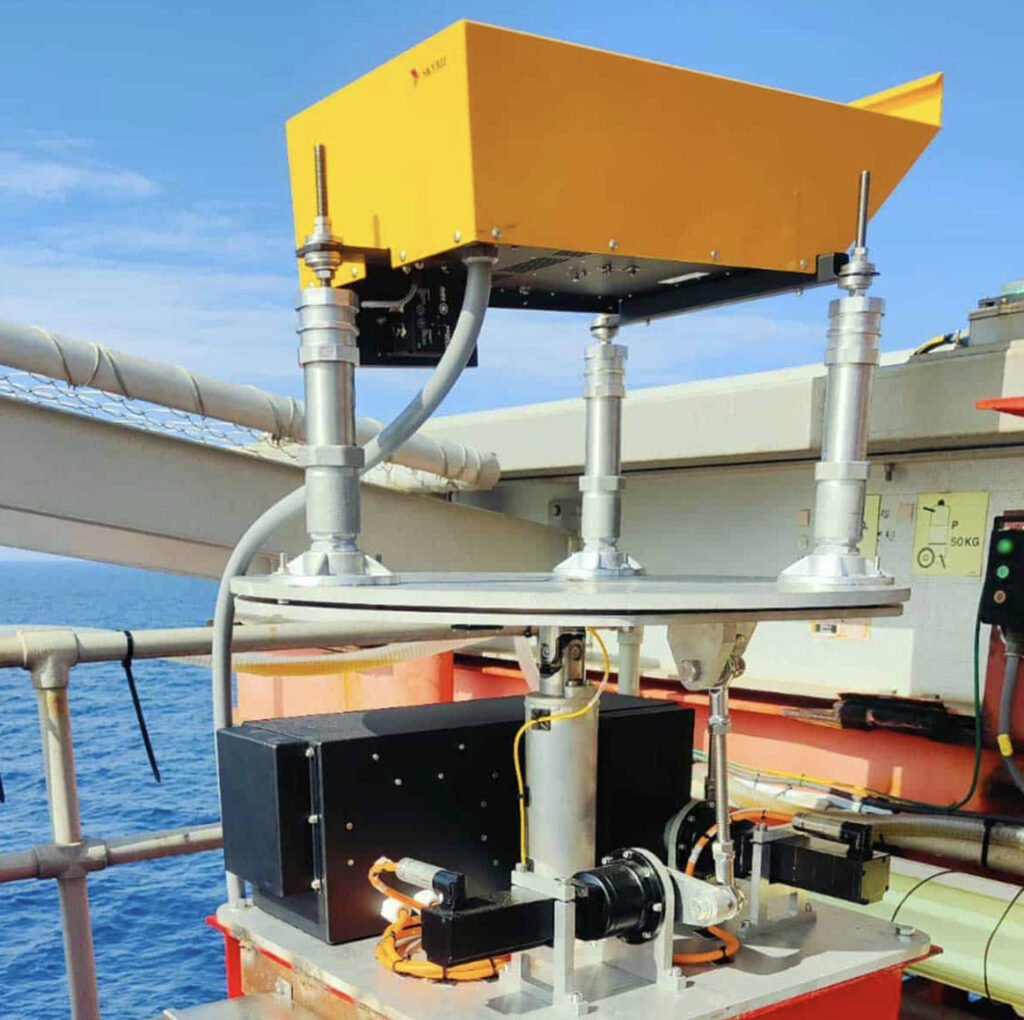
Jednostki pomiaru inercyjnego (IMU) łączą w sobie akcelerometry, żyroskopy i magnetometry, dostarczając niezbędne dane dotyczące ruchu 3D. Dane z systemów inercyjnych są łączone z danymi z enkoderów i GPS w celu zapewnienia stabilizacji na platformach o wysokiej dynamice, takich jak morskie stanowiska artyleryjskie lub gimbale bezzałogowych statków powietrznych (UAV).
Fuzja czujników na rzecz odporności
Połączenie wielu metod pomiarowych zapewnia niezbędną redundancję i znacznie zwiększa dokładność. Zaawansowane algorytmy fuzji czujników filtrują szumy i wykrywają anomalie, utrzymując ciągłość działania i stabilność nawet w przypadku częściowej awarii czujnika, co stanowi nieodzowny wymóg dla wielu wieloosiowych systemów sterowania ruchem.
Zaawansowane technologie sterowania ruchem
Nowoczesne rozwiązania w zakresie ruchu w sektorze obronnym nieustannie ewoluują, integrując technologie nowej generacji:
Algorytmy sterowania predykcyjnego i adaptacyjnego: Umożliwiają one systemom prognozowanie reakcji platformy oraz dynamiczną optymalizację ruchu w warunkach zmiennych, nieprzewidywalnych obciążeń.
Sztuczna inteligencja i uczenie maszynowe: Coraz częściej stosowane do samodostrajania, zaawansowanego wykrywania anomalii oraz wysoce precyzyjnej konserwacji predykcyjnej.
Optymalizacja SWaP-C: Energooszczędne systemy ruchu są niezbędne do spełnienia rygorystycznych wymagań dotyczących rozmiarów, masy, mocy i kosztów (SWaP-C) bezzałogowych statków powietrznych (UAV) oraz kompaktowych platform pojazdowych.
Sterowanie sieciowe i rozproszone (MOSA/SOSA): Przestrzeganie otwartych architektur systemowych jest kluczem do interoperacyjności i szybkiego wdrażania technologii w całym sektorze obronnym.
Cyberbezpieczeństwo w systemach sterowania ruchem
Systemy ruchu stosowane w sektorze obronnym stanowią kluczowe zasoby cyberfizyczne i są podatne na ataki elektroniczne. Nowoczesne sterowniki wykorzystują obecnie bezpieczne procesy uruchamiania, szyfrowanie oraz technologie sprzętowego korzenia zaufania, aby zapobiegać nieuprawnionym ingerencjom w oprogramowanie układowe.
Zgodność z ramami cyberbezpieczeństwa Departamentu Obrony (DoD) gwarantuje, że sieci sterowania zachowują poufność, integralność i dostępność w warunkach zagrożenia. Bezpieczne protokoły komunikacyjne i izolowane domeny sieciowe są standardową praktyką mającą na celu ochronę przed naruszeniem bezpieczeństwa między platformami.
Czołowi specjaliści w dziedzinie sterowania ruchem w sektorze obronnym
Sektor obronny w dużym stopniu opiera się na wyspecjalizowanych firmach inżynieryjnych, które dostarczają podstawowe komponenty do precyzyjnych systemów sterowania ruchem. Firmy te są ekspertami w projektowaniu, produkcji i integracji wzmocnionych rozwiązań klasy wojskowej do najbardziej wymagających zastosowań – od układów uruchamiających, silników i systemów czujnikowych po w pełni stabilizowane platformy. Znajdą Państwo dostawców specjalistycznych rozwiązań do sterowania ruchem na górze tej strony.