Soluções de navegação e posicionamento em condições de indisponibilidade de GNSS/GPS
Categoria Apresentada por
Descubra fornecedores e fabricantes de tecnologias de navegação sem GNSS/GPS que mantêm as plataformas militares operacionais mesmo quando os sinais de satélite estão comprometidos. Estas soluções proporcionam posicionamento e controlo fiáveis para sistemas não tripulados que operam em ambientes disputados, subterrâneos, urbanos e subaquáticos.
Se você projeta, constrói ou fornece Navegação sem GPS, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Estes ambientes são cada vez mais comuns em zonas de combate modernas, especialmente onde os adversários implementam medidas de guerra eletrónica.
Sem sinais de satélite fiáveis, os sistemas não tripulados requerem soluções alternativas que combinem medição inercial, deteção ambiental, mapeamento e estimativa algorítmica. Estas soluções são frequentemente adaptadas ao domínio operacional — terrestre, aéreo, marítimo ou subaquático — e otimizadas para resiliência, precisão e capacidade de resposta em tempo real.
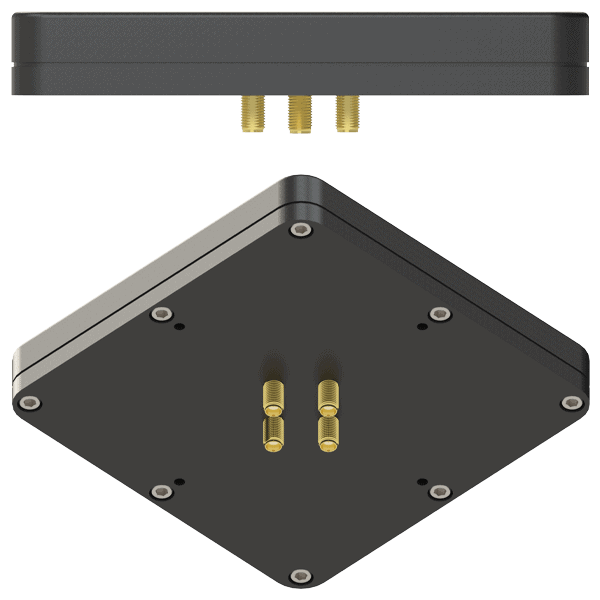
HGuide o480 inercial/GNSS para navegação de drones da Honeywell.
Principais aplicações em ambientes sem GNSS
As capacidades em ambientes sem GNSS são vitais em vários tipos de missões. Os seguintes domínios representam as principais aplicações de defesa para estas tecnologias:
Veículos aéreos não tripulados em espaço aéreo contestado
Os UAS (Sistemas Aéreos Não Tripulados) militares são frequentemente utilizados em zonas de anti-acesso/negação de área (A2/AD), onde se prevê a ocorrência de falsificação e interferência de GNSS. Nestas missões, os UAV dependem de sistemas de navegação inercial, navegação referenciada ao terreno, odometria visual e SLAM para manter o controlo de voo, executar alvos de precisão ou realizar ISR sem apoio de satélite.
As aplicações incluem reconhecimento de longa duração, cartografia tática, munições de permanência e coordenação de enxames de drones, todos exigindo resiliência de navegação independente.
Robótica Terrestre para Operações Urbanas e Subterrâneas
Estas plataformas devem ser capazes de operar em corredores sem cobertura de GPS, passagens subterrâneas, caves ou ambientes de infraestruturas confinadas.
Reconhecimento subterrâneo e em túneis
São utilizados sistemas não tripulados especializados para a exploração subterrânea em áreas de acesso restrito, tais como redes de túneis, complexos de cavernas ou estruturas militares fortificadas. Estes veículos devem navegar sem acesso ao GNSS e estão equipados com conjuntos de sensores para mapeamento, localização e análise estrutural.
São utilizados para:
Detecção de túneis fronteiriços
Mapeamento de instalações subterrâneas hostis
Resposta a catástrofes em infraestruturas desmoronadas
As ferramentas de navegação portáteis ou usadas no corpo são essenciais para as tropas que operam em zonas de guerra eletrónica ou em ambientes com GNSS degradado. Estas ferramentas utilizam navegação por estimativa, magnetómetros e dados do terreno para orientar os operadores de forma silenciosa e precisa.
Tais sistemas são concebidos para:
Forças de operações especiais em áreas de acesso restrito
Rotas secretas de entrada/saída
Navegação sem emissão de RF
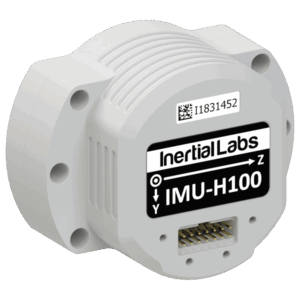
Unidade de medição inercial MEMS, IMU-H100, para navegação de drones, submarinos e veículos autónomos, da Inertial Labs.
Logística e reabastecimento autónomos
Os veículos logísticos não tripulados apoiam a sustentabilidade das missões em regiões com sinal GNSS limitado. As plataformas de reabastecimento terrestres ou aéreas utilizam rotas pré-carregadas, deteção de obstáculos e algoritmos de acompanhamento do terreno para efetuar entregas em ambientes hostis.
Os casos de utilização comuns incluem:
Entrega autónoma de carga a unidades da linha da frente
Lançamento de material médico em zonas de guerra eletrónica
Missões logísticas discretas em espaço aéreo restrito
Tecnologias de navegação que apoiam operações sem GNSS
Os sistemas sem GNSS integram múltiplas modalidades de sensores e métodos computacionais para alcançar uma navegação precisa. As tecnologias principais incluem:
Sistemas de Navegação Inercial (INS): Giroscópios e acelerómetros para navegação por estimativa
Magnetómetros: Ferramentas de orientação semelhantes a bússolas, resistentes à perda de sinal de satélite
Odometria visual: Rastreamento de movimento através da análise de imagens óticas, incluindo a utilização de sensores de fluxo ótico para estimativa de movimento ao nível do pixel
LIDAR e Sensores de radar: Varredura ambiental para posicionamento relativo ao terreno
Navegação acústica: Utilizada em ambientes subaquáticos com sonar ou DVLs
Algoritmos SLAM: Mapeamento e localização em tempo real
Módulos de temporização: OCXOs ou relógios atómicos em escala de chip para sincronização temporal
Estruturas de fusão de sensores: Combinação de múltiplas fontes de dados para uma localização precisa
Tipos de sistemas sem GNSS/GPS
As capacidades sem GNSS variam consoante a missão e a plataforma. Os principais tipos de sistemas incluem:
Módulos de navegação para UAV: Para drones de ataque e ISR em espaço aéreo disputado
Sistemas SLAM para UGV: Concebidos para plataformas terrestres robóticas em terrenos complexos
Conjuntos de navegação subaquática: Adaptados a UUVs para operação totalmente submersa
Kits de navegação vestíveis: Ferramentas compactas para tropas a pé
Sistemas de coordenação de enxames: Lógica de navegação interna para operações autónomas com múltiplos agentes
Normas da indústria e especificações de defesa
Os sistemas de navegação sem GNSS devem cumprir rigorosas normas de defesa para garantir o desempenho e a interoperabilidade. As normas mais comuns incluem:
MIL-STD-810: Normas de ensaio ambiental para vibração, temperatura e choque
MIL-STD-1553 / 1760: Protocolos de comunicação para interfaces de aviónica e armamento
MIL-STD-461: Requisitos de compatibilidade eletromagnética (EMC)
STANAG 4586: Norma da OTAN para interoperabilidade de UAV
DO-178C / DO-254: Aplicável a software e hardware certificados de nível aeroespacial
Estas normas garantem a fiabilidade em ambientes operacionais extremos e permitem a integração com estruturas de comando e controlo existentes.
Comparações com sistemas tradicionais baseados em GNSS
Os sistemas de navegação tradicionais dependem fortemente de constelações GNSS, tais como GPS, GLONASS, Galileo e BeiDou. Embora eficazes em ambientes abertos e estáveis, estes sistemas são vulneráveis a:
Interferência ou falsificação de sinal
Distorção multipath em terrenos urbanos
Negação de sinal em domínios subterrâneos ou subaquáticos
Exposição tática devido a emissões de RF
Os sistemas com recusa de GNSS mitigam estas vulnerabilidades através de deteção interna, aquisição passiva de dados e localização baseada no terreno, oferecendo resiliência e independência da infraestrutura espacial.
Importância estratégica da navegação com recusa de GNSS
À medida que as forças militares se tornam mais dependentes de sistemas autónomos e semiautónomos, a capacidade de operar em condições de negação do GNSS é essencial para a garantia da missão. As ameaças hostis à infraestrutura de satélites e as crescentes capacidades de guerra eletrónica destacam a necessidade estratégica de sistemas de navegação resilientes, modulares e independentes do sinal.
As soluções para condições de negação do GNSS apoiam a flexibilidade operacional, aumentam a capacidade de sobrevivência e garantem a continuidade da missão em todos os domínios: terrestre, aéreo, marítimo e subterrâneo.