Rozwiązania nawigacyjne i pozycjonujące w warunkach braku dostępu do GNSS/GPS
Kategoria prezentowana przez
Zapoznaj się z ofertą dostawców i producentów technologii nawigacyjnych w warunkach braku sygnału GPS/GNSS, które zapewniają gotowość operacyjną platform wojskowych nawet w przypadku zakłóceń sygnałów satelitarnych. Rozwiązania te zapewniają niezawodne pozycjonowanie i sterowanie systemami bezzałogowymi działającymi w środowiskach o ograniczonej widoczności, podziemnych, miejskich i podwodnych.
Jeśli projektujesz, budujesz lub dostarczasz Nawigacja przy braku sygnału GPS, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Środowiska te stają się coraz bardziej powszechne we współczesnych strefach walk, zwłaszcza tam, gdzie przeciwnicy stosują środki wojny elektronicznej.
Bez niezawodnych sygnałów satelitarnych systemy bezzałogowe wymagają alternatywnych rozwiązań łączących pomiary inercyjne, wykrywanie środowiskowe, mapowanie i estymację algorytmiczną. Rozwiązania te są często dostosowane do danego obszaru działania – lądowego, powietrznego, morskiego lub podwodnego – oraz zoptymalizowane pod kątem odporności, dokładności i zdolności reagowania w czasie rzeczywistym.
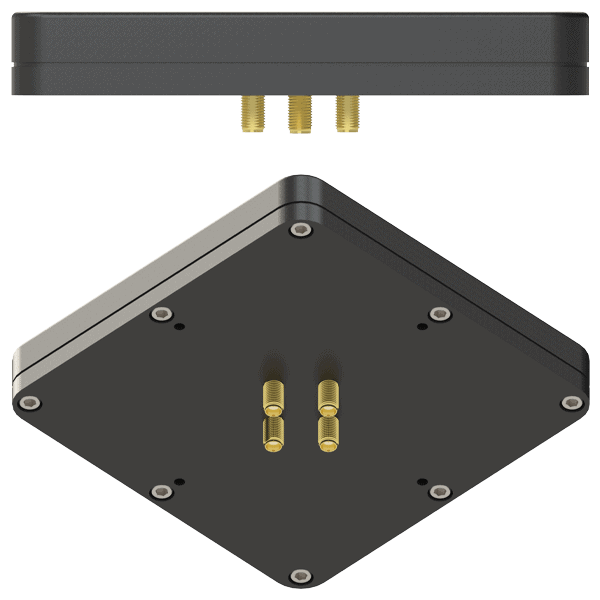
System inercyjny/GNSS HGuide o480 do nawigacji dronów firmy Honeywell.
Kluczowe zastosowania w warunkach braku sygnału GNSS
Funkcje działające w warunkach braku sygnału GNSS mają kluczowe znaczenie w wielu rodzajach misji. Poniższe dziedziny stanowią główne zastosowania tych technologii w sektorze obronnym:
Bezzałogowe statki powietrzne w przestrzeni powietrznej objętej walkami
Wojskowe systemy bezzałogowe (UAS) są często wykorzystywane w strefach zapobiegania dostępowi/odmowy dostępu (A2/AD), gdzie spodziewane jest fałszowanie sygnałów GNSS i zakłócanie. W ramach tych misji bezzałogowe statki powietrzne wykorzystują inercyjne systemy nawigacyjne, nawigację opartą na ukształtowaniu terenu, odometrię wizualną oraz SLAM w celu utrzymania kontroli lotu, precyzyjnego namierzania celów lub prowadzenia działań zwiadowczych, obserwacyjnych i rozpoznawczych (ISR) bez wsparcia satelitarnego.
Zastosowania obejmują długotrwałe rozpoznanie, mapowanie taktyczne, amunicję krążącą oraz koordynację roju dronów, a wszystkie te działania wymagają niezależnej odporności nawigacyjnej.
Robotyka naziemna do operacji miejskich i podziemnych
Platformy te muszą być zdolne do działania w korytarzach, przejściach podziemnych, piwnicach lub zamkniętych środowiskach infrastrukturalnych, gdzie nie ma zasięgu GPS.
Rozpoznanie podziemne i w tunelach
Specjalistyczne systemy bezzałogowe są wykorzystywane do eksploracji podziemnej w obszarach o ograniczonym dostępie, takich jak sieci tuneli, kompleksy jaskiń lub wzmocnione konstrukcje wojskowe. Pojazdy te muszą poruszać się bez dostępu do GNSS i są wyposażone w zestawy czujników do mapowania, lokalizacji i analizy strukturalnej.
Wykorzystuje się je do:
Wykrywanie tuneli granicznych
Mapowanie wrogich obiektów podziemnych
Reagowanie na katastrofy w zawalonej infrastrukturze
Ręczne lub noszone na ciele narzędzia nawigacyjne są niezbędne dla żołnierzy działających w strefach wojny elektronicznej lub w środowiskach o ograniczonej dostępności GNSS. Narzędzia te wykorzystują nawigację zliczeniową, magnetometry i dane terenowe, aby cicho i precyzyjnie prowadzić operatorów.
Systemy takie są przeznaczone dla:
Sił specjalnych w obszarach o ograniczonym dostępie
Tajnych tras wkroczenia/wycofania
Nawigacja bez emisji radiowej
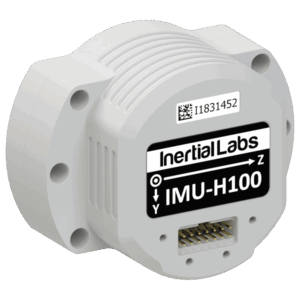
Jednostka pomiaru inercyjnego MEMS, IMU-H100, do nawigacji dronów, łodzi podwodnych i pojazdów autonomicznych, firmy Inertial Labs.
Autonomiczna logistyka i zaopatrzenie
Bezzałogowe pojazdy logistyczne wspierają realizację misji w regionach, w których dostęp do GNSS jest utrudniony. Naziemne lub powietrzne platformy zaopatrzeniowe wykorzystują wstępnie zaprogramowane trasy, wykrywanie przeszkód oraz algorytmy śledzenia ukształtowania terenu, aby realizować dostawy w nieprzyjaznym środowisku.
Zrzuty środków medycznych w strefach działań wojennych
Dyskretne misje logistyczne w przestrzeni powietrznej o ograniczonym dostępie
Technologie nawigacyjne wspierające operacje w warunkach braku sygnału GNSS
Systemy działające w warunkach braku sygnału GNSS integrują wiele rodzajów czujników i metod obliczeniowych w celu zapewnienia dokładnej nawigacji. Do podstawowych technologii należą:
Inercyjne systemy nawigacyjne (INS): żyroskopy i akcelerometry do nawigacji zliczeniowej
Magnetometry: narzędzia orientacyjne podobne do kompasów, odporne na utratę sygnału satelitarnego
Odometria wizualna: śledzenie ruchu poprzez analizę obrazu optycznego, w tym wykorzystanie czujników przepływu optycznego do szacowania ruchu na poziomie pikseli
Czujniki LIDAR i radarowe: skanowanie otoczenia w celu pozycjonowania względem terenu
Nawigacja akustyczna: stosowana w środowiskach podwodnych z wykorzystaniem sonaru lub DVL
Algorytmy SLAM: mapowanie i lokalizacja w czasie rzeczywistym
Moduły czasowe: zegary atomowe OCXO lub w skali chipowej do synchronizacji czasu
Struktury fuzji czujników: Łączenie wielu źródeł danych w celu dokładnej lokalizacji
Rodzaje systemów bez dostępu do GNSS/GPS
Możliwości w warunkach braku sygnału GNSS różnią się w zależności od misji i platformy. Do kluczowych typów systemów należą:
Moduły nawigacyjne dla bezzałogowych statków powietrznych (UAV): Przeznaczone dla dronów bojowych oraz dronów ISR w przestrzeni powietrznej objętej walkami
Systemy SLAM dla pojazdów naziemnych (UGV): Przeznaczone dla zrobotyzowanych platform naziemnych w trudnym terenie
Zestawy nawigacji podwodnej: Dostosowane do pojazdów podwodnych (UUV) do działania w pełnym zanurzeniu
Zestawy nawigacyjne do noszenia: Kompaktowe narzędzia dla żołnierzy pieszych
Systemy koordynacji roju: Wewnętrzna logika nawigacyjna dla wieloagentowych operacji autonomicznych
Normy branżowe i specyfikacje obronne
Systemy nawigacyjne działające bez dostępu do GNSS muszą spełniać rygorystyczne normy obronne, aby zapewnić wydajność i interoperacyjność. Do powszechnie stosowanych norm należą:
MIL-STD-810: Normy testów środowiskowych dotyczących wibracji, temperatury i wstrząsów
MIL-STD-1553 / 1760: Protokoły komunikacyjne dla interfejsów awioniki i uzbrojenia
MIL-STD-461: Wymagania dotyczące kompatybilności elektromagnetycznej (EMC)
STANAG 4586: Norma NATO dotycząca interoperacyjności bezzałogowych statków powietrznych (UAV)
DO-178C / DO-254: Standardy mające zastosowanie do certyfikowanego oprogramowania i sprzętu klasy lotniczej
Normy te zapewniają niezawodność w ekstremalnych warunkach operacyjnych i umożliwiają integrację z istniejącymi strukturami dowodzenia i kontroli.
Porównanie z tradycyjnymi systemami opartymi na GNSS
Tradycyjne systemy nawigacyjne w znacznym stopniu opierają się na konstelacjach GNSS, takich jak GPS, GLONASS, Galileo i BeiDou. Chociaż systemy te sprawdzają się w otwartych i stabilnych środowiskach, są podatne na:
Zakłócanie lub fałszowanie sygnału
Zniekształcenia spowodowane wielodrożnością w terenie miejskim
Brak dostępu w środowiskach podziemnych lub podwodnych
Systemy odporne na zakłócenia GNSS ograniczają te słabe punkty poprzez wewnętrzne czujniki, pasywne gromadzenie danych oraz lokalizację opartą na ukształtowaniu terenu, zapewniając odporność i niezależność od infrastruktury kosmicznej.
Strategiczne znaczenie nawigacji odpornej na zakłócenia GNSS
W miarę jak siły zbrojne stają się coraz bardziej zależne od systemów autonomicznych i półautonomicznych, zdolność do działania w warunkach braku dostępu do GNSS ma zasadnicze znaczenie dla zapewnienia powodzenia misji. Zagrożenia ze strony przeciwnika dla infrastruktury satelitarnej oraz rosnące możliwości w zakresie wojny elektronicznej podkreślają strategiczną potrzebę posiadania odpornych, modułowych i niezależnych od sygnału systemów nawigacyjnych.
Rozwiązania działające w warunkach braku dostępu do GNSS wspierają elastyczność operacyjną, zwiększają przeżywalność i zapewniają ciągłość misji we wszystkich środowiskach: lądowym, powietrznym, morskim i podziemnym.