Demuestra tus capacidades.
Si diseñas, construyes o suministras Navegación sin GPS, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.


Descubra proveedores y fabricantes de tecnologías de navegación sin GPS/GNSS que mantienen operativas las plataformas militares incluso cuando las señales de satélite se ven comprometidas. Estas soluciones proporcionan un posicionamiento y un control fiables para sistemas no tripulados que operan en entornos conflictivos, subterráneos, urbanos y submarinos.


Sistemas avanzados de navegación inercial (INS) para una navegación fiable en entornos operativos difíciles

Soluciones inerciales de vanguardia para navegación y posicionamiento de alta precisión en entornos sin cobertura GPS.

Soluciones avanzadas para la modernización de la defensa: propulsión, sensores, comunicación y sistemas de realidad aumentada
Soluciones tácticas de IMU, GPS/INS y orientación de armas

Soluciones de navegación resistentes, tanto tripuladas como no tripuladas, para entornos sin cobertura GNSS

Comunicaciones por satélite fiables, resilientes y seguras, y soluciones PNT garantizadas para aplicaciones de misión crítica.

Tecnologías de control de vuelo y navegación sin GNSS de última generación para plataformas UAV militares y gubernamentales.

Sensores inerciales y sistemas de navegación de alto rendimiento con fibra óptica, giroscopio láser en anillo y MEMS

Sensores inerciales MEMS, giroscopios y acelerómetros para guía inercial, control y estabilización
Soluciones PNT garantizadas para aplicaciones militares, de defensa y gubernamentales de misión crítica

Tecnologías de UAV de vanguardia para empresas de defensa, fabricantes de drones e integradores de sistemas
Si diseñas, construyes o suministras Navegación sin GPS, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.

La navegación sin GPS/GNSS permite a los vehículos militares y a las plataformas autónomas determinar su posición y movimiento en entornos en los que los sistemas globales de navegación por satélite no están disponibles, interferidos o falsificados.
Estos entornos son cada vez más habituales en las zonas de combate modernas, especialmente allí donde los adversarios despliegan medidas de guerra electrónica.
Sin señales de satélite fiables, los sistemas no tripulados requieren soluciones alternativas que combinen la medición inercial, la detección ambiental, la cartografía y la estimación algorítmica. Estas soluciones suelen adaptarse al ámbito operativo —tierra, aire, mar o subsuperficie— y optimizarse para garantizar la resiliencia, la precisión y la capacidad de respuesta en tiempo real.

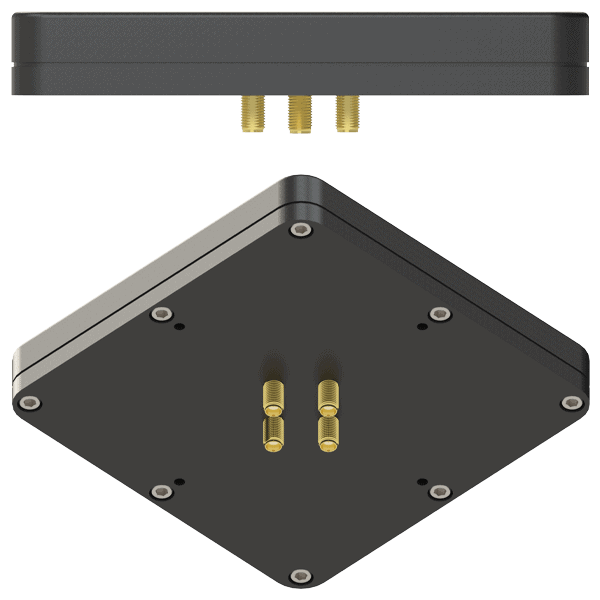
HGuide o480 inercial/GNSS para la navegación de drones de Honeywell.
Las capacidades sin GNSS son vitales en múltiples tipos de misiones. Los siguientes ámbitos representan las principales aplicaciones de defensa de estas tecnologías:
Los UAS (sistemas aéreos no tripulados) militares se despliegan a menudo en zonas de denegación de acceso/denegación de área (A2/AD), donde se prevé la suplantación y el bloqueo del GNSS. En estas misiones, los UAV se basan en sistemas de navegación inercial, navegación referenciada al terreno, odometría visual y SLAM para mantener el control de vuelo, ejecutar el apuntado de precisión o llevar a cabo ISR sin apoyo satelital.
Entre sus aplicaciones se incluyen el reconocimiento de larga duración, la cartografía táctica, municiones de vuelo estacionario y la coordinación de enjambres de drones, todas ellas actividades que requieren una resiliencia de navegación independiente.
Los cañones urbanos pueden provocar distorsión por trayectos múltiples o una pérdida total de la señal. En estos entornos, los vehículos terrestres no tripulados (UGV) utilizan IMU de grado táctico, sensores LIDAR, radares y algoritmos SLAM para dar soporte a:
Estas plataformas deben ser capaces de operar en corredores sin cobertura GPS, pasos subterráneos, sótanos o entornos de infraestructura confinados.
Se despliegan sistemas no tripulados especializados para la exploración subterránea en zonas de acceso restringido, tales como redes de túneles, complejos de cuevas o estructuras militares fortificadas. Estos vehículos deben navegar sin acceso al GNSS y están equipados con paquetes de sensores para cartografía, localización y análisis estructural.
Se utilizan para:
Las señales GNSS no penetran en el agua, lo que hace que todas las operaciones submarinas carezcan inherentemente de cobertura GPS. Los vehículos submarinos no tripulados (UUV) utilizan registradores de velocidad Doppler (DVL), sensores inerciales, mapas batimétricos y balizas acústicas para la navegación.
Entre sus aplicaciones se incluyen:
Las herramientas de navegación portátiles o que se llevan en el cuerpo son esenciales para las tropas que operan en zonas de guerra electrónica o en entornos con señal GNSS degradada. Estas herramientas utilizan la navegación por estima, magnetómetros y datos del terreno para guiar a los operadores de forma silenciosa y precisa.
Dichos sistemas están diseñados para:

Unidad de medición inercial MEMS, IMU-H100, para la navegación de drones, submarinos y vehículos autónomos, de Inertial Labs.
Los vehículos logísticos no tripulados facilitan el mantenimiento de las misiones en regiones con cobertura GNSS limitada. Las plataformas de reabastecimiento terrestres o aéreas utilizan rutas precargadas, detección de obstáculos y algoritmos de seguimiento del terreno para completar las entregas en entornos hostiles.
Entre los casos de uso habituales se incluyen:
Los sistemas sin GNSS integran múltiples modalidades de sensores y métodos computacionales para lograr una navegación precisa. Las tecnologías principales incluyen:
Las capacidades sin GNSS varían según la misión y la plataforma. Entre los tipos de sistemas clave se incluyen:
Los sistemas de navegación sin GNSS deben cumplir rigurosas normas de defensa para garantizar el rendimiento y la interoperabilidad. Entre las normas de aplicación habitual se incluyen:
Estas normas garantizan la fiabilidad en entornos operativos extremos y permiten la integración con los marcos de mando y control existentes.
Los sistemas de navegación tradicionales dependen en gran medida de constelaciones GNSS como GPS, GLONASS, Galileo y BeiDou. Aunque son eficaces en entornos abiertos y estables, estos sistemas son vulnerables a:
Los sistemas con denegación de GNSS mitigan estas vulnerabilidades mediante sensores internos, adquisición pasiva de datos y localización basada en el terreno, lo que ofrece resiliencia e independencia de la infraestructura espacial.
A medida que las fuerzas militares dependen cada vez más de sistemas autónomos y semiautónomos, la capacidad de operar en condiciones de denegación del GNSS es esencial para garantizar el éxito de las misiones. Las amenazas hostiles a la infraestructura satelital y el aumento de las capacidades de guerra electrónica ponen de relieve la necesidad estratégica de contar con sistemas de navegación resilientes, modulares e independientes de la señal.
Las soluciones para entornos sin GNSS favorecen la flexibilidad operativa, mejoran la capacidad de supervivencia y garantizan la continuidad de las misiones en todos los ámbitos: terrestre, aéreo, marítimo y subterráneo.
 Búsqueda de empresas y productos
Búsqueda de empresas y productos



 Suscríbete al boletín semanal de eBrief
Las últimas novedades en ingeniería y tecnología directamente en tu bandeja de entrada: únete a miles de ingenieros que ya las reciben.
Suscríbete al boletín semanal de eBrief
Las últimas novedades en ingeniería y tecnología directamente en tu bandeja de entrada: únete a miles de ingenieros que ya las reciben.