Soluzioni di navigazione e posizionamento in assenza di GNSS/GPS
Categoria Presentata da
Scoprite i fornitori e i produttori di tecnologie di navigazione in assenza di GPS/GNSS che mantengono operative le piattaforme militari anche quando i segnali satellitari sono compromessi. Queste soluzioni forniscono un posizionamento e un controllo affidabili per i sistemi senza pilota che operano in ambienti contesi, sotterranei, urbani e subacquei.
Se progettate, costruite o fornite Navigazione in assenza di segnale GPS, Crea un profilo per mettere in evidenza le tue competenze ed entrare in contatto con i visitatori che hanno un bisogno concreto delle tue soluzioni.
Tali ambienti sono sempre più comuni nelle moderne zone di combattimento, specialmente laddove gli avversari ricorrono a misure di guerra elettronica.
In assenza di segnali satellitari affidabili, i sistemi senza pilota richiedono soluzioni alternative che combinino misurazione inerziale, rilevamento ambientale, mappatura e stima algoritmica. Queste soluzioni sono spesso adattate al dominio operativo – terra, aria, mare o sottosuolo – e ottimizzate in termini di resilienza, precisione e reattività in tempo reale.
HGuide o480 inerziale/GNSS per la navigazione dei droni di Honeywell.
Principali applicazioni in assenza di GNSS
Le funzionalità in assenza di GNSS sono fondamentali in molteplici tipi di missione. I seguenti ambiti rappresentano le principali applicazioni di difesa per queste tecnologie:
Veicoli aerei senza pilota in spazi aerei contesi
Gli UAS (sistemi aerei senza pilota) militari vengono spesso impiegati in zone di anti-accesso/negazione dell’area (A2/AD) dove sono previsti spoofing e jamming del GNSS. In queste missioni, gli UAV si affidano a sistemi di navigazione inerziale, navigazione con riferimento al terreno, odometria visiva e SLAM per mantenere il controllo di volo, eseguire il puntamento di precisione o condurre attività ISR senza il supporto satellitare.
Le applicazioni includono la ricognizione a lunga autonomia, la mappatura tattica, munizioni vaganti e il coordinamento di sciami di droni, tutte attività che richiedono una resilienza di navigazione indipendente.
Robotica terrestre per operazioni urbane e sotterranee
Queste piattaforme devono essere in grado di operare in corridoi, sottopassaggi, scantinati o ambienti infrastrutturali confinati in cui il segnale GPS è assente.
Ricognizione sotterranea e in galleria
Vengono impiegati sistemi senza pilota specializzati per l’esplorazione sotterranea in aree non accessibili, quali reti di gallerie, complessi di grotte o strutture militari fortificate. Questi veicoli devono navigare senza accesso al GNSS e sono dotati di pacchetti di sensori per la mappatura, la localizzazione e l’analisi strutturale.
Sono utilizzati per:
Rilevamento di tunnel di confine
Mappatura di strutture sotterranee ostili
Risposta alle catastrofi in infrastrutture crollate
Monitoraggio delle infrastrutture del fondale marino
Operazioni ISR segrete
Operazioni tattiche e navigazione dei soldati appiedati
Gli strumenti di navigazione portatili o indossabili sono essenziali per le truppe che operano in zone di guerra elettronica o in ambienti con segnale GNSS degradato. Questi strumenti utilizzano la navigazione a stima, magnetometri e dati del terreno per guidare gli operatori in modo silenzioso e preciso.
Tali sistemi sono progettati per:
Forze di operazioni speciali in aree negate
Percorsi di ingresso/uscita segreti
Navigazione silenziosa dal punto di vista delle radiofrequenze
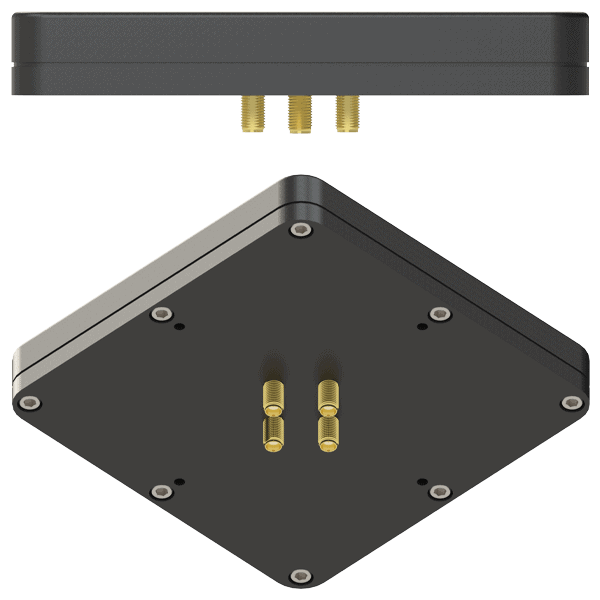
Unità di misura inerziale MEMS, IMU-H100, per la navigazione di droni, sottomarini e veicoli autonomi, di Inertial Labs.
Logistica autonoma e rifornimento
I veicoli logistici senza pilota supportano il sostegno delle missioni in regioni con copertura GNSS limitata. Le piattaforme di rifornimento terrestri o aeree utilizzano percorsi precaricati, rilevamento degli ostacoli e algoritmi di tracciamento del terreno per completare le consegne in ambienti ostili.
I casi d’uso più comuni includono:
Consegna autonoma di merci alle unità in prima linea
Lanci di forniture mediche in zone di guerra elettronica
Missioni logistiche a basso profilo in spazi aerei negati
Tecnologie di navigazione a supporto delle operazioni in assenza di GNSS
I sistemi in assenza di GNSS integrano diverse modalità di sensori e metodi computazionali per ottenere una navigazione accurata. Le tecnologie principali includono:
Sistemi di navigazione inerziale (INS): giroscopi e accelerometri per la navigazione a stima
Magnetometri: strumenti di orientamento simili a bussole resistenti alla perdita del segnale satellitare
Odometria visiva: tracciamento del movimento tramite analisi ottica delle immagini, compreso l’uso di sensori di flusso ottico per la stima del movimento a livello di pixel
Sensori LIDAR e Radar: scansione ambientale per il posizionamento relativo al terreno
Navigazione acustica: utilizzata in ambienti subacquei con sonar o DVL
Algoritmi SLAM: mappatura e localizzazione in tempo reale
Framework di fusione dei sensori: combinazione di più fonti di dati per una localizzazione accurata
Tipi di sistemi senza GNSS/GPS
Le funzionalità in assenza di GNSS variano a seconda della missione e della piattaforma. I principali tipi di sistemi includono:
Moduli di navigazione per UAV: per droni da attacco e ISR in spazi aerei contesi
Sistemi SLAM per UGV: progettati per piattaforme terrestri robotizzate su terreni complessi
Suite di navigazione subacquea: su misura per UUV per operazioni completamente sommerse
Kit di navigazione indossabili: strumenti compatti per truppe appiedate
Sistemi di coordinamento di sciami: logica di navigazione interna per operazioni autonome multi-agente
Standard industriali e specifiche di difesa
I sistemi di navigazione senza GNSS devono soddisfare rigorosi standard di difesa per garantire prestazioni e interoperabilità. Gli standard comunemente applicati includono:
MIL-STD-810: Standard di test ambientali per vibrazioni, temperatura e urti
MIL-STD-1553 / 1760: protocolli di comunicazione per interfacce avioniche e di armamento
MIL-STD-461: Requisiti di compatibilità elettromagnetica (EMC)
STANAG 4586: Standard NATO per l’interoperabilità degli UAV
DO-178C / DO-254: Applicabili a software e hardware certificati per il settore aerospaziale
Questi standard garantiscono l’affidabilità in ambienti operativi estremi e consentono l’integrazione con le strutture di comando e controllo esistenti.
Confronto con i sistemi tradizionali basati su GNSS
I sistemi di navigazione tradizionali fanno ampio ricorso a costellazioni GNSS quali GPS, GLONASS, Galileo e BeiDou. Sebbene efficaci in ambienti aperti e stabili, questi sistemi sono vulnerabili a:
Disturbo o spoofing del segnale
Distorsione multipath in ambito urbano
Indisponibilità in ambienti sotterranei o subacquei
Esposizione tattica dovuta alle emissioni RF
I sistemi con copertura GNSS limitata mitigano queste vulnerabilità attraverso il rilevamento interno, l’acquisizione passiva dei dati e la localizzazione basata sul terreno, offrendo resilienza e indipendenza dall’infrastruttura spaziale.
Importanza strategica della navigazione con copertura GNSS limitata
Man mano che le forze militari diventano sempre più dipendenti da sistemi autonomi e semi-autonomi, la capacità di operare in condizioni di negazione del GNSS è essenziale per garantire il successo delle missioni. Le minacce ostili alle infrastrutture satellitari e le crescenti capacità di guerra elettronica evidenziano la necessità strategica di sistemi di navigazione resilienti, modulari e indipendenti dal segnale.
Le soluzioni in condizioni di negazione del GNSS supportano la flessibilità operativa, migliorano la sopravvivenza e garantiscono la continuità delle missioni in tutti i domini: terra, aria, mare e sottosuolo.