Numerous unmanned aerial vehicles (UAVs) utilize dual motor or coaxial propulsion systems, wherein two rotors function along the same axis of rotation, yet in opposing directions.
When developing such systems, various factors must be taken into account, including propeller size, speed, and the distance between rotors. Making informed design choices enables the creation of the most effective UAV in terms of thrust, torque, and efficiency.
Read Tyto Robotics comprehensive study analyzing different dual motor and coaxial rotor configurations. The company’s investigation focused on how each variable impacts performance, specifically:
- Rotor speed
- Distance between rotors
- Size of the propellers
- Relative rotor speed
Tyto Robotics considers these findings essential for all unmanned aircraft designers, as they can lead to improved vehicle designs that enhance efficiency and performance.
Methodology
This report encapsulates our findings regarding the physical interactions between rotors during coaxial testing, particularly the effect of the front rotor on the rear rotor. We evaluated the impact of rotor distance, rotational speed, and propeller diameter.
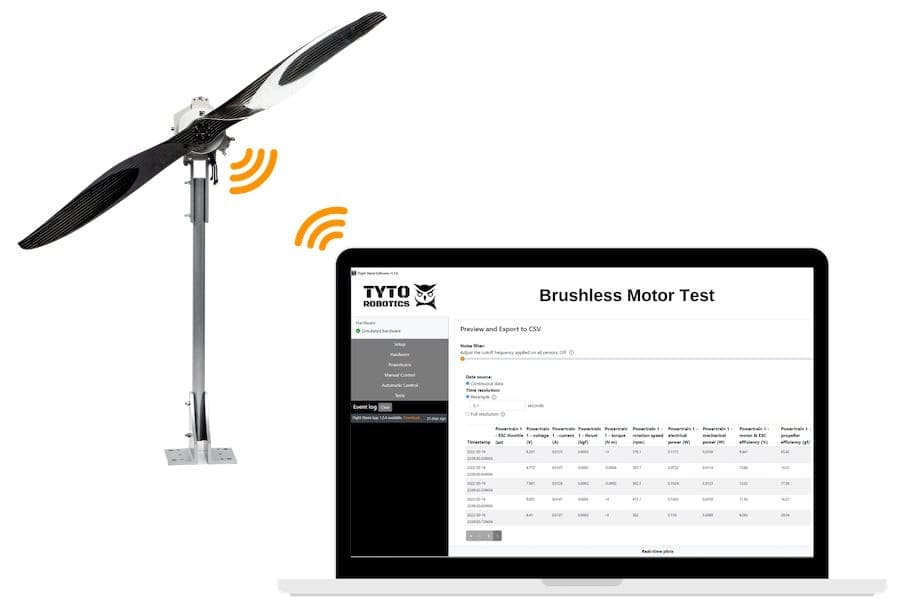
For the experiments, we utilized two Flight Stand 50 thrust stands capable of measuring up to 50 kgf of thrust and 30 Nm of torque, in addition to RPM, voltage, current, mechanical power, electrical power, propeller efficiency, motor efficiency, and overall propulsion system efficiency.
The Flight Stand software operates the thrust stand and allows for testing up to eight powertrains concurrently. Remote control of the Flight Stand is also possible, enabling safe operation away from the spinning propellers.
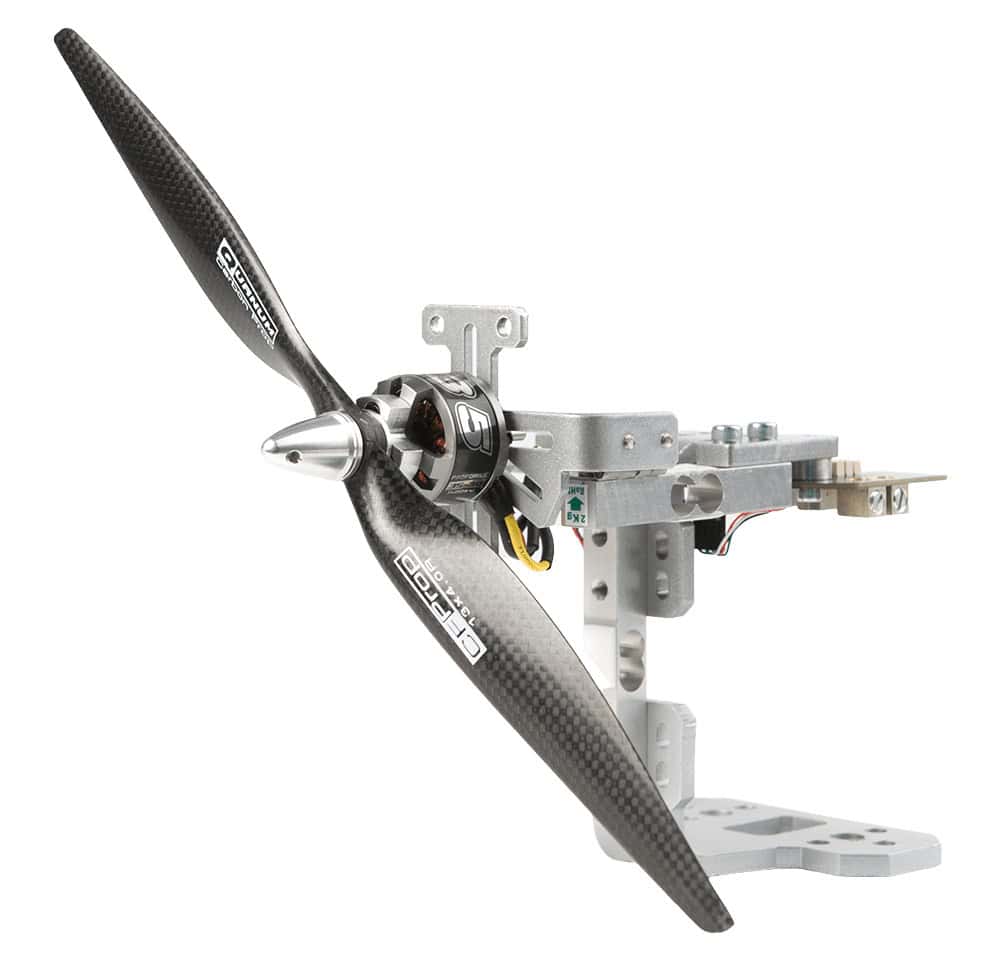
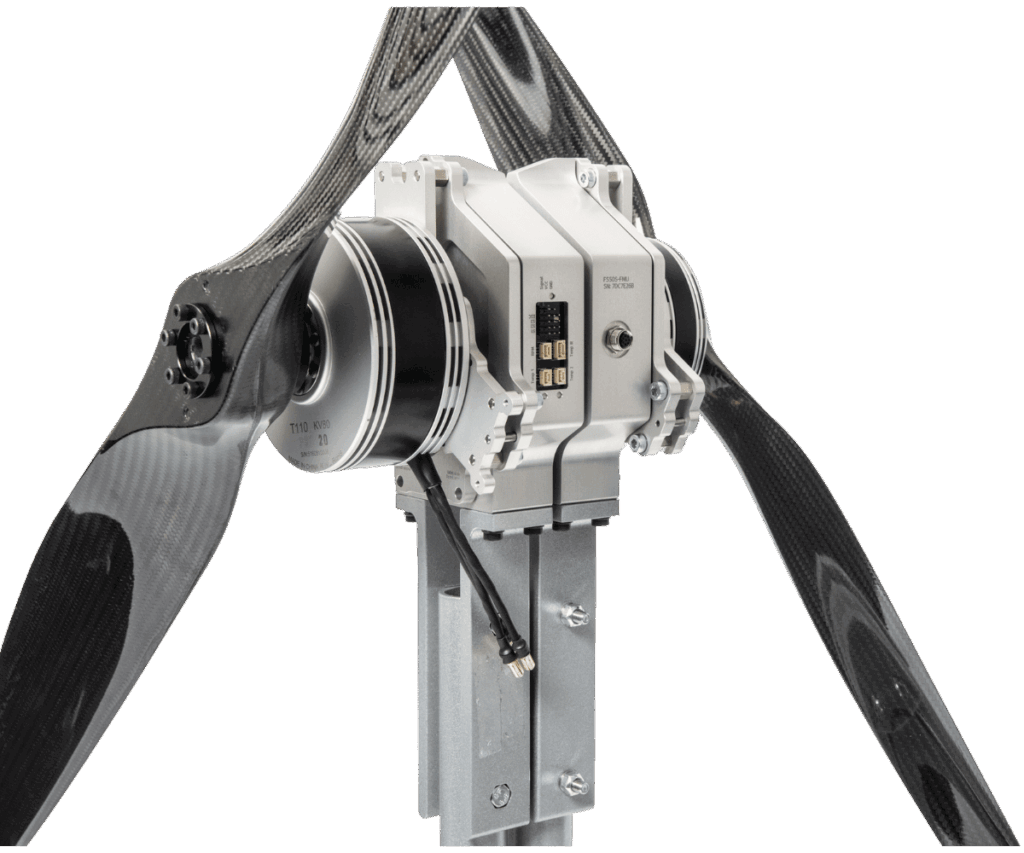
During the coaxial tests, the two Flight Stands were arranged back to back on a rail system, with a brushless motor and propeller mounted on each of the stands’ force measurement units (FMUs).
The two propellers were configured to rotate in opposite directions, ensuring that the torques from the motors counterbalance each other, stabilizing the structure. This coaxial arrangement in a UAV prevents unwanted vertical axis rotation during flight due to torque effects.
To ensure the airflow produced by the rear propeller aligned with that from the front propeller, the rear propeller was inverted (see figure 1). In tests involving varying distances between rotors, the measurement was taken between the two FMUs.

Figure 1: The coaxial testing set-up.
How Propeller Speed and Rotor Separation Influence Thrust and Torque Generation
Initially, we investigated how rotation speed and rotor separation distance affect the thrust and torque generated by the rear rotor (R2). We expected that R2’s performance would be influenced by the front rotor (R1), as it is positioned directly within R1’s airflow.
The first series of tests were conducted with R1 rotating at two distinct speeds: 1600 and 2200 RPM. We repeated the tests at four different separation distances: 10, 30, 50, and 70 mm. The outcomes are illustrated in figures 2 and 3.

Figure 2: R2 thrust vs. speed at four coaxial separations and two R1 speeds.
Figure 2 depicts the evolution of R2 thrust as a function of R2 speed across different R1 speeds and separation distances. Two distinct groups of curves emerge, corresponding to each R1 speed. The thrust of R2 was consistently lower across all separation distances and R2 speeds when R1 operated at the faster 2200 RPM.

Figure 3: R2 torque vs. speed at four coaxial separations and two R1 speeds.
Figure 3 illustrates the relationship between R2 torque and R2 speed, evaluated at the same R1 speeds and separation distances as the previous experiment. Similar to thrust, R2’s torque decreased when R1 was rotating at 2200 RPM.
The results indicate that the rotor separation distance does not significantly influence the thrust produced by R2. Generally, we can deduce that an increase in the rotation speed of the front rotor (R1) leads to a reduction in the thrust and torque produced by the rear rotor (R2).
Impact of Rear Propeller Size on Thrust and Torque Generation
In this section, we analyze how the size (diameter) of the rear propeller affects the thrust and torque produced by R2. Two different rear propeller sizes were tested: 40” (matching the front propeller size) and 47”.
The rotational speed varied while the separation distance between FMUs remained constant at 20 mm.


Figure 4: R2 thrust vs. speed with 40” (top) and 47″ (bottom) rear propeller.
Figure 4 shows the thrust produced by R2 as a function of R2 speed, at four different R1 speeds. The upper graph displays results for the 40″ rear propeller, while the lower graph shows results for the 47″ rear propeller. As anticipated, the 47” propeller generated greater thrust than the 40” propeller across all R1 and R2 speeds.
A decline in R2 thrust was observed with both propeller sizes as R1 speed increased from 1600 to 2200 RPM, along with a similar decrease in torque (data not shown). The reduction in thrust appeared more pronounced for the 47” rear propeller, indicated by the wider spread between thrust data points at 1600 RPM and 2200 RPM.
We propose two hypotheses to explain this phenomenon.
Hypothesis 1: The airflow produced by the front propeller applies a force on the rear propeller. This resistive load, acting in the opposite direction to the thrust generated by R1 (see figure 5), is recorded by the FMU. Consequently, this resistive load is subtracted from the raw thrust value recorded.

Figure 5: The thrust and resistive forces experienced by R1 and R2.
Hypothesis 2: R1 generates turbulence, and the drag it induces counteracts the thrust and torque generated by R2. This drag is evident from the windmilling effect observed when throttle is applied to R1 but not to R2. As R1’s speed increases, more drag is produced, resulting in a more substantial loss of thrust.
When throttle is applied to the front rotor, it rotates, causing the rear propeller to turn without any throttle input. The torque is measured as negative because it reflects the resistive torque in the motor, which acts to slow the rotation of the propeller. This effect is caused by the drag generated by the airflow from R1.
This reaction is observable when no electrical power is supplied: R2 self-rotates, functioning akin to a wind turbine (see figure 6).

Figure 6: Aerodynamic forces causing windmilling in a rotor blade.
The 3D plot in figure 7 illustrates the variation of R2 torque as R1 and R2 speeds change. The blue and yellow surfaces are interpolated from the data points gathered.
The blue surface depicts the torque evolution at a rotor separation distance of 10 mm, while the yellow surface represents the torque at a distance of 25 mm. This chart illustrates the occurrence of negative torque when minimal or no throttle is applied to R2.

Figure 7: Evolution of the R2 torque depending on the rotors’ speed – 10 mm separation (blue) and 25 mm (yellow).
Propeller Efficiency
Propeller efficiency is a critical indicator of rotor performance, measuring the thrust generated in relation to the power input.
Propeller efficiency is calculated as the thrust generated divided by the mechanical power of the propeller (propeller rotation speed multiplied by the torque).

Where:
ηp = propeller efficiency (gf/W)
Fth = thrust force (gf)
𝒯= torque (N.m)
ω = rotation speed (rad/s)
We analyzed how propeller efficiency varied with rotation speed and the separation distance between rotors. In figure 8, R2 propeller efficiency is plotted against R2 speed. Each curve corresponds to a different combination of R1 speed (1600 vs. 2200 RPM) and separation distance (10, 30, 50, or 70 mm).
Measurements were taken at R2 speeds of 1200, 1400, 1600, 1800, 2000, and 2200 RPM, with curves interpolated based on these data points.

Figure 8: R2 propeller efficiency as a function of speed and separation distance.
As observed, two groups of curves emerge, distinguished by R1 rotation speed. Across all R2 speeds and separation distances, R2 demonstrates higher propeller efficiency at the increased R1 speed of 2200 RPM.
For the curves corresponding to R1 rotating at 2200 RPM, there is a consistent decline in R2 propeller efficiency across the entire range of R2 speeds. Conversely, when R1 operates at 1600 RPM, there is an increase and peak in R2 efficiency at approximately 1450 RPM, followed by a gradual decline similar to the curves for the higher R1 speed.
At elevated speeds, the inter-rotor distance has a negligible impact on R2 propeller efficiency. At lower speeds for both R1 and R2, a smaller separation distance is linked to higher efficiency. This distinction is more pronounced at lower R1 and R2 speeds compared to instances when R1 speed is high and R2 speed is low. The effect becomes noticeable when R2 operates at or below approximately 1750 RPM.
Conclusion
This study observed the effects of several variables on the performance of coaxial rotor systems, highlighting the significant impact of the front rotor on the rear rotor.
Key findings include:
- Increasing front propeller speed may result in lower thrust and torque generation in the rear propeller.
- Increasing the diameter of the rear propeller may exacerbate the reduction in thrust generation as front propeller speed increases.
- In a coaxial setup, greater overlap between propeller disc areas may lead to increased thrust loss in the rear propeller.
- The rear propeller can experience negative thrust and torque, as well as a self-rotation effect, due to the influence of the front propeller.
- Rear propeller efficiency may be higher at lower separation distances at low speeds (<1750 RPM).
- At higher speeds (>1750 RPM), the separation distance between propellers has minimal impact on rear propeller efficiency.
- Rear propeller efficiency may improve when the front propeller operates at higher speeds.