Embarcaciones, robots y vehículos de inspección submarina
Busque y compare proveedores y fabricantes de sistemas de inspección submarina diseñados para aplicaciones de defensa. Estos robots y vehículos permiten a los equipos evaluar estructuras sumergidas, identificar amenazas y apoyar operaciones de búsqueda y recuperación, proporcionando imágenes de alta calidad y datos de sensores en entornos peligrosos o inaccesibles.
Si diseñas, construyes o suministras Embarcaciones de inspección submarina, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
Embarcaciones, robots y vehículos de inspección submarina
Resumen por
Eleanor Widdows
Actualizado:
Las fuerzas de defensa utilizan la inspección con drones submarinos para observar, evaluar y documentar entornos sumergidos con visibilidad limitada o acceso restringido. Entre ellos se incluyen puertos, muelles, cables submarinos, infraestructuras submarinas y cascos de buques. Las plataformas empleadas abarcan desde vehículos operados a distancia (ROV) conectados por cable hasta vehículos sobre orugas y sistemas robóticos autónomos. Los usuarios del sector de la defensa recurren a esta tecnología para tareas específicas de cada misión en las que se requiere un conocimiento de la situación en tiempo real o un análisis posterior a la misión.
La mayoría de los sistemas de inspección submarina están equipados con cargas útiles configurables, tales como sonares, cámaras de vídeo, magnetómetros e instrumentos de navegación. En función de las necesidades operativas, los vehículos pueden equiparse con brazos robóticos, sistemas de gestión de cables o unidades de batería modulares para mejorar el rendimiento. Algunos modelos pueden operar tanto en superficie como sumergidos, adaptándose a diferentes terrenos y al alcance de la misión.
Aplicaciones de defensa de los sistemas de inspección submarina
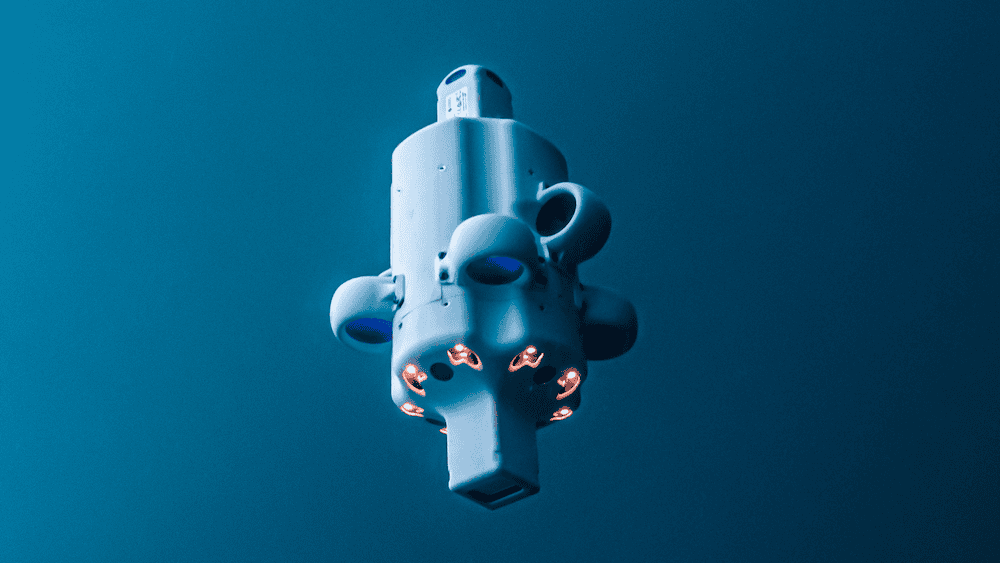
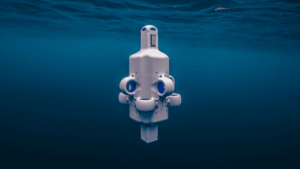
Vehículo de inspección submarina autónomo Hydrus de Advanced Navigation
Las tecnologías de inspección cumplen múltiples funciones en operaciones de defensa navales, conjuntas y expedicionarias. Entre ellas se incluyen:
Búsqueda y recuperación: Se utilizan para localizar equipos hundidos, aeronaves accidentadas o restos tras incidentes marítimos. Los patrones de búsqueda pueden estar preprogramados o guiados por el operador.
Identificación de amenazas: Se despliega para inspeccionar objetos desconocidos o potencialmente peligrosos adheridos a cascos de buques, muelles o instalaciones en el lecho marino.
Monitorización de infraestructuras: Se aplica en evaluaciones rutinarias y situacionales de instalaciones portuarias militares, cables submarinos y muros de presas.
Análisis forense subacuático: Se utiliza para documentar escenas del crimen sumergidas o lugares de impacto con sensores e imágenes de alta fidelidad.
Inspecciones de seguridad: Se emplea para detectar puntos de acceso no autorizados, brechas en el casco o anomalías físicas en zonas de seguridad.
Evaluación del mantenimiento: Facilita las evaluaciones del estado de los activos navales y las estructuras subacuáticas sin interrumpir las operaciones.
Estas funciones reducen los retrasos operativos, minimizan la exposición de los buzos y contribuyen a una evaluación precisa de las amenazas y a los flujos de trabajo de mantenimiento de los activos.
Tipos de plataformas de inspección submarina
Se utilizan varias categorías de plataformas submarinas en función de la profundidad, el terreno y el perfil de la misión:
ROV de inspección
Vehículo de inspección Bayonet 350 de Greensea IQ
Los vehículos operados a distancia (ROV) son plataformas sumergibles conectadas por cable que se pilotan desde una estación en superficie. Los ROV de inspección suelen ser ligeros y compactos, capaces de maniobrar en espacios reducidos o llenos de escombros. Pueden incluir sonar, brazos manipuladores y cámaras de alta resolución. Los ROV se utilizan con frecuencia en inspecciones de cascos, barridos de puertos y evaluaciones estructurales de infraestructuras sumergidas.
Robots de inspección
Los robots submarinos autónomos o semiautónomos están configurados para misiones de reconocimiento planificadas previamente o para la monitorización del estado. Estas unidades suelen incluir sistemas de alimentación a bordo, módulos de navegación y conjuntos de sensores. Son adecuados para cubrir áreas más extensas en las que el control directo mediante cable resulta poco práctico, como el reconocimiento de rutas, el reconocimiento de campos de minas o la monitorización continua de instalaciones submarinas.
Vehículos anfibios sobre orugas
Los vehículos sobre orugas con capacidad anfibia operan tanto en tierra como bajo el agua, prestando apoyo en tareas en zonas intermareales y entornos de aguas poco profundas. Estas plataformas se utilizan para inspeccionar cimientos de puentes, estructuras portuarias y presas de poca profundidad. Su diseño permite la movilidad por terrenos submarinos irregulares y sobre superficies secas sin necesidad de reajustes.
Caterpulares submarinos
Estos vehículos se adhieren a las superficies mediante imanes o succión, lo que permite una inspección detallada de estructuras verticales como cascos y muros de presas. Los caterpulares proporcionan un movimiento estable a lo largo de superficies fijas y pueden operar en zonas con fuertes corrientes o de baja visibilidad. A menudo están equipados con sensores, luces y sistemas de vídeo para el examen detallado de los activos.
Componentes y capacidades del sistema
Cada sistema de inspección submarina integra una combinación de subsistemas mecánicos, ópticos, acústicos y electrónicos, entre los que se incluyen:
Inspección submarina con Bayonet 250 de Greensea IQ
Sistemas de navegación: Los sistemas de navegación inercial (INS), el posicionamiento acústico (USBL) y los registradores de velocidad Doppler (DVL) se utilizan para el seguimiento de la ubicación en tiempo real en entornos sin GPS.
Cargas útiles de sensores: Estas pueden incluir sonares de imagen, sensores acústicos, escáneres láser, sensores de presión y magnetómetros para recopilar datos multidimensionales sobre el entorno y las estructuras.
Movilidad y propulsión: Los propulsores, las orugas o los sistemas de propulsión híbridos permiten el desplazamiento por el agua o por el lecho marino. Algunos vehículos incluyen módulos de flotabilidad activos para ajustar la profundidad.
Herramientas de inspección visual: Las cámaras (monocromáticas, en color, para condiciones de poca luz), los escáneres de línea láser y la iluminación LED facilitan la documentación en entornos turbios o con baja visibilidad.
Sistemas de manipulación: Se pueden añadir brazos robóticos, manipuladores y pinzas para interactuar con objetos submarinos o realizar muestreos físicos.
Comunicación y alimentación: Los vehículos pueden alimentarse a través de cables umbilicales o baterías internas, y utilizan módems de comunicación o fibra óptica para la transferencia de datos a la estación de control.
Registro de datos: Los registradores y grabadores de datos a bordo permiten el análisis fuera de línea, mientras que la telemetría en tiempo real permite la toma de decisiones en directo durante las misiones.
Normas militares e industriales pertinentes
Los equipos de inspección submarina utilizados en aplicaciones de defensa deben cumplir con normas de ingeniería y operativas que garanticen la fiabilidad, la seguridad y la interoperabilidad. Entre ellas se incluyen:
MIL-STD-810: Detalla los procedimientos de ensayo para las tensiones ambientales, incluyendo temperaturas extremas, corrosión por agua salada y condiciones de presión submarina.
MIL-STD-1474 y MIL-STD-461: Abordan los límites de ruido y la compatibilidad electromagnética relevantes para los sistemas navales y submarinos.
STANAG 1364: Establece los requisitos de interoperabilidad para los ROV y los sistemas submarinos en el marco de las operaciones de la OTAN.
IMCA R 002 / R 004: Directrices sobre el funcionamiento seguro, la certificación y el mantenimiento de vehículos operados a distancia y autónomos en los sectores industrial y de defensa.
IEEE 1451: Proporciona una interfaz estandarizada para conectar sensores y transductores a sistemas de adquisición de datos.
Comparaciones y consideraciones operativas
En comparación con las inspecciones realizadas por buzos, las plataformas submarinas robóticas ofrecen una mayor duración operativa, una mayor repetibilidad y una seguridad mejorada. Las limitaciones pueden incluir el acceso físico a espacios muy reducidos o la necesidad de operadores cualificados y apoyo logístico. Estas plataformas pueden mejorar significativamente la precisión de los datos y la seguridad de la misión cuando se combinan con operaciones dirigidas por buzos.
Las principales compensaciones operativas incluyen:
Movilidad frente a estabilidad: los ROV de natación libre y los UUV (vehículos submarinos no tripulados) ofrecen una cobertura más exhaustiva, pero pueden verse más afectados por las corrientes que los vehículos con orugas de arrastre.
Autonomía frente a control: Las unidades autónomas reducen la intervención humana, pero requieren una planificación previa a la misión y sistemas de seguridad contra fallos robustos.
Carga de sensores frente a autonomía: Una mayor carga útil de sensores puede reducir la duración de la misión debido al aumento del consumo de energía y la resistencia aerodinámica.
La selección de la plataforma de inspección adecuada depende de los parámetros específicos de la misión, la infraestructura de despliegue disponible y los factores ambientales.
Tendencias emergentes en la inspección submarina para la defensa
Los avances tecnológicos están influyendo en las capacidades de inspección submarina de próxima generación. Las áreas de desarrollo actuales incluyen:
Detección distribuida: Despliegue de micro-ROV o mini-ROV coordinados que realizan inspecciones en paralelo con sistemas de control compartidos.
Análisis impulsado por IA: Procesamiento a bordo para el reconocimiento de objetos, la detección de anomalías estructurales y los ajustes en la planificación de la misión.
Sistemas energéticos avanzados: Mejoras en la composición química de las baterías y módulos de energía híbridos para ampliar la autonomía submarina y el tiempo de funcionamiento de los sensores.
Comunicación integrada: uso de módems de comunicación entre dominios para conectar los sistemas submarinos con UAV y buques de superficie, con el fin de lograr una conciencia situacional unificada.
Diseños modulares compactos: énfasis en unidades de inspección modulares y de fácil despliegue que puedan reconfigurarse para múltiples tipos de misiones con cambios mínimos en el hardware.
A medida que la inspección submarina sigue evolucionando, los operadores de defensa están incorporando estas tecnologías en marcos de seguridad marítima más amplios, incluyendo contramedidas contra minas, vigilancia submarina y protección de infraestructuras.