Source multi-track fusion software from leading suppliers and manufacturers for defense applications involving sensor fusion, radar tracking, multi-domain operations, and command and control environments. These solutions support enhanced target tracking, radar fusion, and integrated situational awareness across air, land, sea, and joint operations.
If you design, build or supply Multi-Track Fusion Software, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
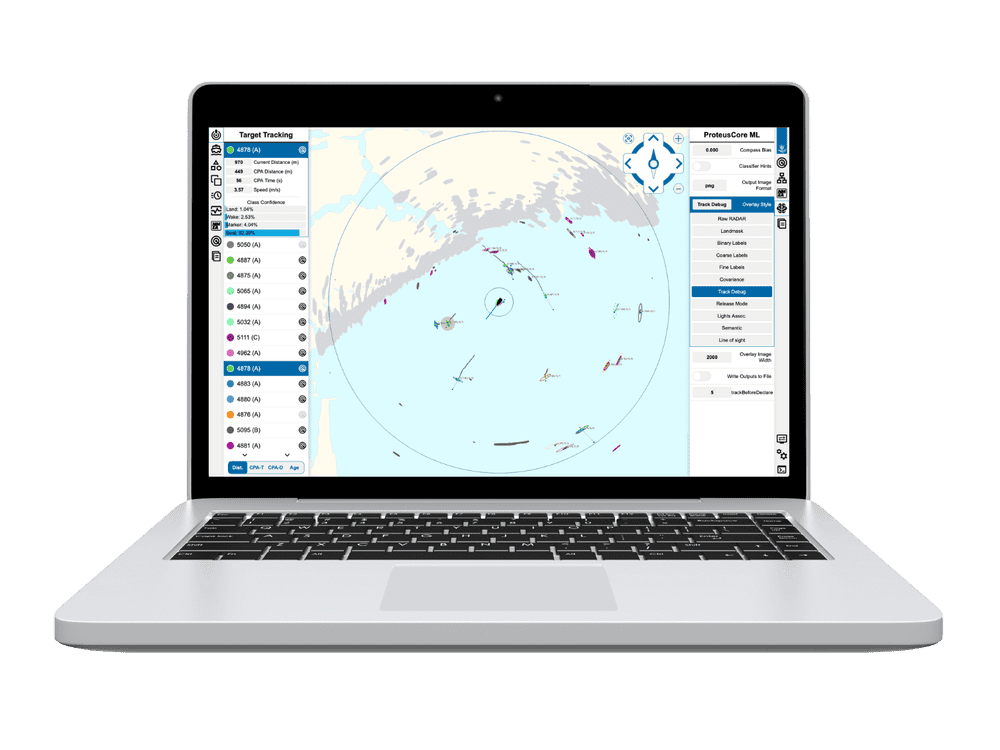
Machine learning-powered radar processing software for enhanced vessel perception
Machine learning-powered radar processing software for enhanced vessel perception
... is a powerful software package that utilizes proprietary machine learning models to provide rapid... ...he ProteusCore software automatically tunes radar gain and adjusts the range, continually optimizing...
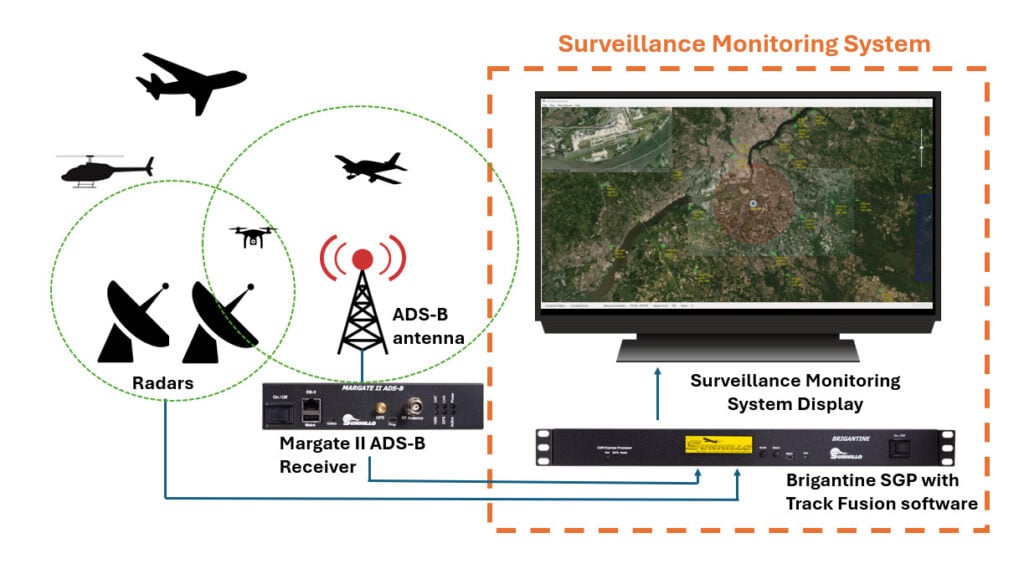
Multi-track fusion software provides a unified operational picture by combining radar, optical, infrared, acoustic, ADS-B, AIS, and other sensor inputs into coherent tracks. It supports integrated air and missile defense, airspace monitoring, UAV tracking, and broader battlefield situational awareness by reducing ambiguity and increasing confidence in target identification across multi-domain environments.
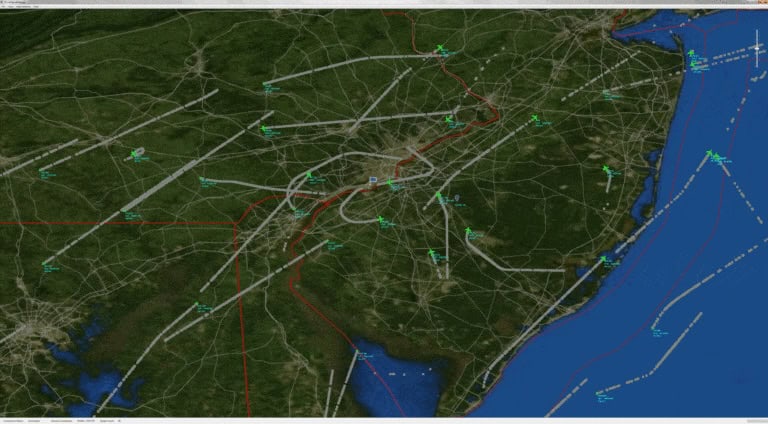
Multi-Track Fuser by Sunhillo.
These platforms use advanced state estimation, tracking algorithms, and data association techniques to process track data, plot formats, and feature-level measurements from distributed sensors. Centralized fusion processors provide unified control for large defense networks, while distributed fusion nodes support scalable, resilient operations. Together, they generate high-integrity fused tracks that minimize false alarms, improve continuity for maneuvering or low-observable targets, and enhance decision-making for command-and-control (C2) systems.
Applications in Defense Operations
Multi-track fusion software is deployed across a wide range of defense applications where high-confidence situational awareness is essential. Key use cases include:
Integrated air and missile defense for correlation of radar sensors and threat detection systems
Airspace monitoring with ADS-B and radar tracking integration
Maritime domain awareness with AIS receivers and radar fusion
Multi-target tracking for UAV tracking, EW tracking, and ground surveillance
C2 systems requiring reliable, consolidated track information for operations planning and engagement decisions
These systems enhance targeting accuracy, reduce operator workload, and support coordinated responses across land, air, sea, and space domains.
Types of Multi-Track Fusion Approaches
Different fusion methodologies address specific operational and sensor requirements. Common types include:
Track-to-Track Fusion
This approach merges processed tracks from multiple radar sensors, EO IR sensors, or tracking algorithms. It maintains sensor independence, reduces processing load, and improves consistency.
Sensor-to-Track Fusion
Raw sensor measurements, such as plots, detections, and range-angle data, are fused at the measurement level. This enables the fusion processor to generate higher-accuracy state estimates using its own estimation models.
Decision-Level Fusion
Outputs from multiple fusion systems, C2 systems, or intelligence platforms are consolidated into high-level assessments such as threat classifications or intent evaluations. This approach supports strategic decision-making in joint environments.
Feature-Level Fusion
Sensor characteristics, including signal strength, spectral signatures, or IR features, are combined with tracking logic to improve recognition and reduce misclassification in cluttered environments.
Tracking Algorithms and Estimation Methods
Multi-track fusion software incorporates a range of advanced estimation and filtering techniques. Standard methods include Kalman filters, extended Kalman filters, unscented Kalman filters, particle filters, nearest neighbor filters, and joint probabilistic data association. These algorithms enable robust tracking in noisy environments, with maneuvering targets, or with sensor gaps.
State estimators generate position, velocity, and acceleration estimates for each track by integrating observations from radar, optical, infrared, lidar, and acoustic sensors. Adaptive estimation enables consistent performance in diverse conditions, including jamming, clutter, and fast target maneuvers.
Architectures and System Integration
Fusion architectures must align with mission requirements, available sensors, and command structures. Typical architectures include:
Centralized Fusion Processors
Provide unified processing for systems requiring synchronized track management and coordinated engagement across multiple domains.
Distributed Fusion Nodes
Operate at the sensor or platform level to reduce latency, increase redundancy, and support decentralized decision-making in contested environments.
Hierarchical Fusion Engines
Combine centralized and distributed models to balance performance, resilience, and scalability across large operational theaters.
Modular Fusion Stacks
Enable integration with legacy radar, C2, and situational awareness systems via modular adapters and standardized interfaces.
Comparisons and Performance Factors
When evaluating multi-track fusion platforms, defense organizations consider several criteria:
Track consistency and correlation performance
Data latency and computational efficiency
Sensor compatibility and domain interoperability
Algorithm support for advanced tracking scenarios
Integration with radar tracking, AIS systems, ADS-B receivers, and EO IR sensors
Performance must be maintained across diverse sensor types and operational conditions, including maritime clutter, dense air traffic, and complex land operations.
Relevant Standards and Interoperability
Multi-track fusion systems rely on established military standards to ensure interoperability across platforms and coalition partners. These may include:
MIL-STD messaging formats for radar and sensor data exchange
STANAG specifications for NATO-compliant track and plot formatting
C2 system interface standards governing messaging, correlation logic, and track management
Structured data models for integrated air and missile defense systems and multi-domain operations
Compliance with these standards ensures reliable communication, coherent track association, and seamless integration with joint command structures.
Operational Benefits
Multi-track fusion software enhances situational awareness by delivering consistent, high-confidence tracks generated from multi-sensor inputs. This improves threat detection, targeting accuracy, and decision-making within demanding operational environments. By supporting multi-domain integration and maintaining track reliability across diverse sensor networks, these systems play a critical role in modern defense operations.
Sunhillo Corporation has confirmed its participation in the MICH-AIR program, supporting ResilienX with mission-critical surveillance data fusion for BVLOS and autonomous aircraft operations
In this Q&A, Sunhillo outlines how its surveillance technologies are enhancing U.S. military operations, with real-world deployment examples and innovations in cybersecurity and data integration
Defense Advancement showcases Sunhillo’s mission-critical surveillance data distribution and conversion products for government, military, and national defense organizations
Jan 17, 2025
Advancing Defense Capability Through Strategic Collaboration
Defense Advancement works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive defense capabilities forward.