Oprogramowanie do fuzji wielotorowej od wiodących dostawców i producentów do zastosowań obronnych obejmujących fuzję danych z czujników, śledzenie radarowe, operacje wielodomenowe oraz środowiska dowodzenia i kontroli. Rozwiązania te wspierają ulepszone śledzenie celów, fuzję danych radarowych oraz zintegrowaną świadomość sytuacyjną w operacjach powietrznych, lądowych, morskich i połączonych.
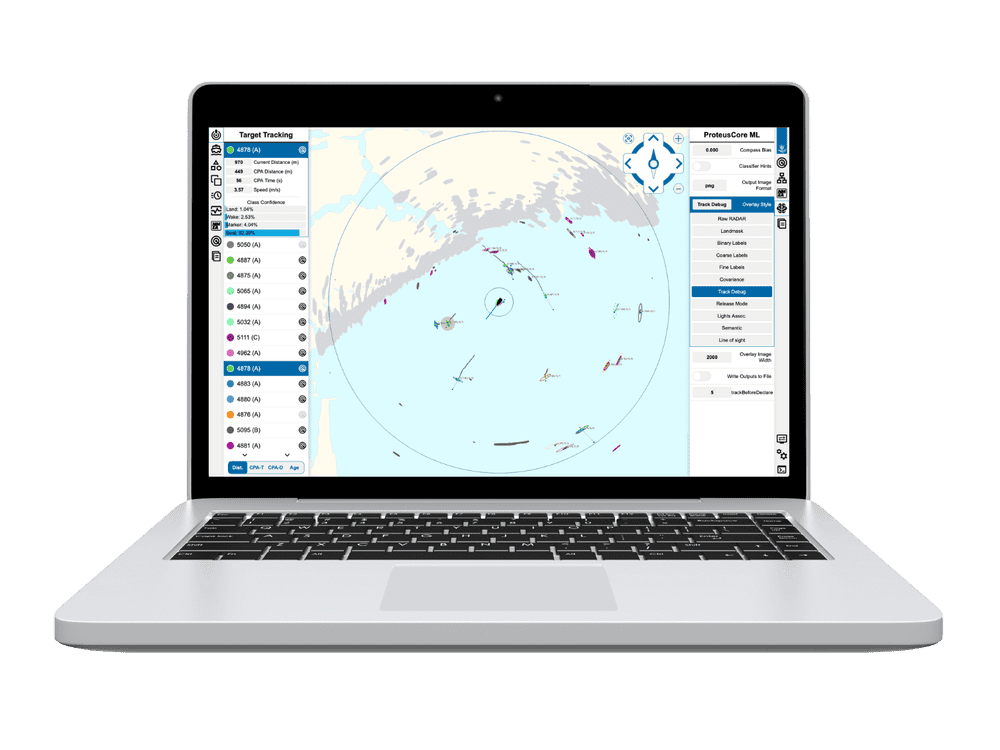
Rozwiązania nowej generacji do przetwarzania danych z radarów morskich, zapewniające lepszą orientację sytuacyjną w zastosowaniach marynarki wojennej i obronnych
Jeśli projektujesz, budujesz lub dostarczasz Oprogramowanie do fuzji wielotorowej, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Oprogramowanie do fuzji danych z wielu źródeł zapewnia spójny obraz operacyjny poprzez połączenie danych radarowych, optycznych, podczerwieni, akustyczne, ADS-B, AIS oraz dane z innych czujników w spójne ślady. Oprogramowanie to wspiera zintegrowaną obronę powietrzną i przeciwrakietową, monitorowanie przestrzeni powietrznej, śledzenie bezzałogowych statków powietrznych (UAV) oraz szerszą świadomość sytuacyjną na polu walki poprzez zmniejszenie niejasności i zwiększenie pewności identyfikacji celów w środowiskach wielodomenowych.
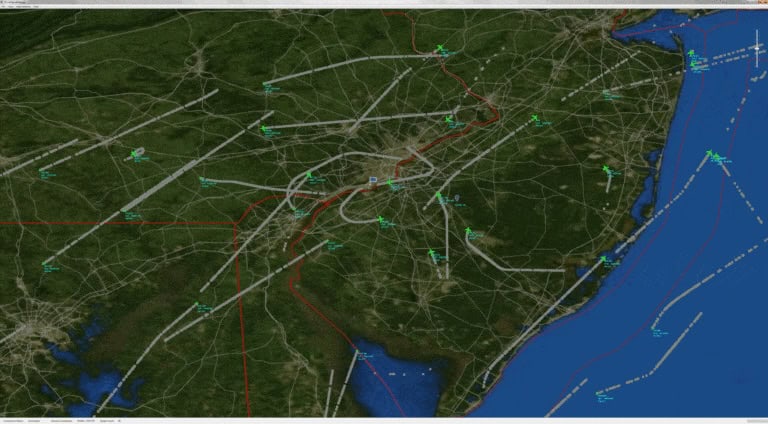
Multi-Track Fuser firmy Sunhillo.
Platformy te wykorzystują zaawansowane algorytmy estymacji stanu, śledzenia oraz techniki asocjacji danych do przetwarzania danych śledzenia, formatów wykresów oraz pomiarów na poziomie cech z rozproszonych czujników. Scentralizowane procesory fuzji zapewniają ujednoliconą kontrolę nad dużymi sieciami obronnymi, podczas gdy rozproszone węzły fuzji wspierają skalowalne i odporne operacje. Wspólnie generują one ślady o wysokiej integralności, które minimalizują liczbę fałszywych alarmów, poprawiają ciągłość śledzenia celów manewrujących lub trudno wykrywalnych oraz usprawniają proces podejmowania decyzji w systemach dowodzenia i kontroli (C2).
Zastosowania w operacjach obronnych
Oprogramowanie do fuzji wielu śladów jest wdrażane w szerokim zakresie zastosowań obronnych, w których niezbędna jest wysoka pewność rozpoznania sytuacji. Kluczowe przypadki użycia obejmują:
Zintegrowana obrona powietrzna i przeciwrakietowa w celu korelacji czujników radarowych i systemów wykrywania zagrożeń
Monitorowanie przestrzeni powietrznej z wykorzystaniem ADS-B oraz integracji śledzenia radarowego
Świadomość sytuacji w obszarze morskim z wykorzystaniem odbiorników AIS i fuzji danych radarowych
Śledzenie wielu celów w zakresie śledzenia bezzałogowych statków powietrznych (UAV), śledzenia środków walki elektronicznej (EW) oraz nadzoru naziemnego
Systemy dowodzenia i kontroli (C2) wymagające niezawodnych, skonsolidowanych informacji o śledzeniu na potrzeby planowania operacji i podejmowania decyzji o zaangażowaniu
Systemy te zwiększają celność namierzania, zmniejszają obciążenie operatora oraz wspierają skoordynowane działania w obszarach lądowym, powietrznym, morskim i kosmicznym.
Rodzaje podejść do fuzji wielu śladów
Różne metody fuzji odpowiadają konkretnym wymaganiom operacyjnym i czujnikowym. Do typowych rodzajów należą:
Fuzja śladów
Podejście to łączy przetworzone ślady pochodzące z wielu czujników radarowych, czujników EO IR lub algorytmów śledzenia. Zapewnia ono niezależność czujników, zmniejsza obciążenie przetwarzania i poprawia spójność.
Fuzja typu „czujnik-ślad”
Surowe pomiary czujników, takie jak wykresy, wykrycia oraz dane dotyczące odległości i kąta, są łączone na poziomie pomiarów. Umożliwia to procesorowi fuzji generowanie szacunków stanu o wyższej dokładności przy użyciu własnych modeli estymacyjnych.
Fuzja na poziomie decyzji
Wyniki z wielu systemów fuzji, systemów C2 lub platform wywiadowczych są konsolidowane w oceny wysokiego poziomu, takie jak klasyfikacje zagrożeń lub oceny intencji. Podejście to wspiera strategiczne podejmowanie decyzji w środowiskach połączonych.
Fuzja na poziomie cech
Charakterystyki czujników, w tym siła sygnału, sygnatury spektralne lub cechy podczerwieni, są łączone z logiką śledzenia w celu poprawy rozpoznawania i zmniejszenia liczby błędnych klasyfikacji w środowiskach o dużym natężeniu zakłóceń.
Algorytmy śledzenia i metody estymacji
Oprogramowanie do fuzji wielotorowej wykorzystuje szereg zaawansowanych technik estymacji i filtrowania. Standardowe metody obejmują filtry Kalmana, rozszerzone filtry Kalmana, filtry Kalmana bez zapachu, filtry cząsteczkowe, filtry najbliższego sąsiedztwa oraz wspólne probabilistyczne kojarzenie danych. Algorytmy te umożliwiają niezawodne śledzenie w środowiskach zakłóconych, w przypadku celów manewrujących lub przy brakach w danych z czujników.
Estymatory stanu generują oszacowania pozycji, prędkości i przyspieszenia dla każdego śladu poprzez integrację obserwacji z czujników radarowych, optycznych, podczerwieni, lidarowych i akustycznych. Estymacja adaptacyjna zapewnia stałą wydajność w zróżnicowanych warunkach, w tym przy zakłóceniach, zanieczyszczeniu obrazu i szybkich manewrach celów.
Architektury i integracja systemowa
Architektury fuzji muszą być dostosowane do wymagań misji, dostępnych czujników i struktur dowodzenia. Typowe architektury obejmują:
Scentralizowane procesory fuzji
Zapewniają ujednolicone przetwarzanie dla systemów wymagających zsynchronizowanego zarządzania śledzeniem i skoordynowanego działania w wielu domenach.
Rozproszone węzły fuzji
Działają na poziomie czujnika lub platformy w celu zmniejszenia opóźnień, zwiększenia nadmiarowości oraz wsparcia zdecentralizowanego podejmowania decyzji w środowiskach o ograniczonej widoczności.
Hierarchiczne silniki fuzji
Łączą modele scentralizowane i rozproszone w celu zapewnienia równowagi między wydajnością, odpornością i skalowalnością na rozległych obszarach operacyjnych.
Modułowe stosy fuzji
Umożliwiają integrację ze starszymi systemami radarowymi, dowodzenia i kontroli (C2) oraz systemami rozpoznania sytuacyjnego za pośrednictwem modułowych adapterów i znormalizowanych interfejsów.
Porównania i czynniki wpływające na wydajność
Oceniając platformy fuzji wielotorowej, organizacje obronne biorą pod uwagę kilka kryteriów:
Spójność śledzenia i wydajność korelacji
Opóźnienia danych i wydajność obliczeniowa
Kompatybilność czujników i interoperacyjność między domenami
Obsługa algorytmów dla zaawansowanych scenariuszy śledzenia
Integracja z systemami śledzenia radarowego, systemami AIS, odbiornikami ADS-B oraz czujnikami EO IR
Wydajność musi być utrzymana w przypadku różnych typów czujników i warunków operacyjnych, w tym zakłóceń morskich, gęstego ruchu lotniczego i złożonych operacji lądowych.
Odpowiednie normy i interoperacyjność
Systemy fuzji wielotorowej opierają się na ustalonych standardach wojskowych w celu zapewnienia interoperacyjności między platformami i partnerami koalicyjnymi. Mogą one obejmować:
Specyfikacje STANAG dotyczące formatowania śladów i wykresów zgodnych z wymogami NATO
Standardy interfejsów systemów C2 regulujące komunikację, logikę korelacji oraz zarządzanie śladami
Strukturalne modele danych dla zintegrowanych systemów obrony powietrznej i przeciwrakietowej oraz operacji wielodomenowych
Zgodność z tymi standardami zapewnia niezawodną komunikację, spójne powiązania śladów oraz płynną integrację ze wspólnymi strukturami dowodzenia.
Korzyści operacyjne
Oprogramowanie do fuzji wielotorowej poprawia świadomość sytuacyjną, dostarczając spójne, wysoce wiarygodne ślady generowane na podstawie danych z wielu czujników. Poprawia to wykrywanie zagrożeń, celność namierzania oraz proces podejmowania decyzji w wymagających środowiskach operacyjnych. Dzięki obsłudze integracji wielodomenowej oraz utrzymaniu niezawodności śledzenia w zróżnicowanych sieciach czujników systemy te odgrywają kluczową rolę we współczesnych operacjach obronnych.