Veicoli, robot e imbarcazioni per l'ispezione subacquea
Cercate e confrontate fornitori e produttori di sistemi di ispezione subacquea realizzati per applicazioni di difesa. Questi robot e veicoli consentono alle squadre di valutare strutture sommerse, identificare minacce e supportare operazioni di ricerca e recupero, fornendo immagini di alta qualità e dati dei sensori in ambienti pericolosi o inaccessibili.
Se progettate, costruite o fornite Veicoli di ispezione subacquei, Crea un profilo per mettere in evidenza le tue competenze ed entrare in contatto con i visitatori che hanno un bisogno concreto delle tue soluzioni.
Veicoli, robot e imbarcazioni per l'ispezione subacquea
Panoramica da
Eleanor Widdows
Aggiornato:
Le forze armate utilizzano i droni subacquei per l’ispezione al fine di osservare, valutare e documentare ambienti sommersi con visibilità limitata o accesso ristretto. Tra questi figurano porti, bacini portuali, cavi sottomarini, infrastrutture subacquee e scafi delle navi. Le piattaforme impiegate spaziano dai veicoli telecomandati (ROV) collegati via cavo ai veicoli cingolati e ai sistemi robotici autonomi. Gli utenti del settore della difesa si affidano a questa tecnologia per compiti specifici delle missioni in cui è richiesta la consapevolezza della situazione in tempo reale o l’analisi post-missione.
La maggior parte dei sistemi di ispezione subacquea è dotata di carichi utili configurabili quali sonar, videocamere, magnetometri e strumenti di navigazione. A seconda delle esigenze operative, i veicoli possono essere equipaggiati con bracci robotici, sistemi di gestione dei cavi o unità batteria modulari per migliorare le prestazioni. Alcuni modelli possono operare in superficie e in immersione, adattandosi a terreni variabili e all’ambito della missione.
Applicazioni dei sistemi di ispezione subacquea nel settore della difesa
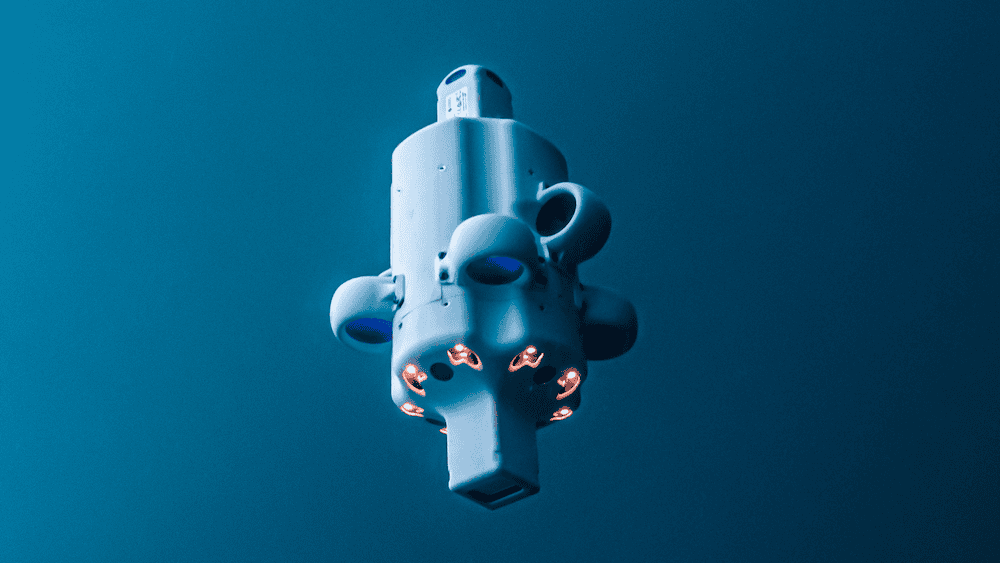
Veicolo subacqueo autonomo di ispezione Hydrus di Advanced Navigation
Le tecnologie di ispezione svolgono molteplici funzioni nell’ambito delle operazioni di difesa navali, congiunte e di spedizione. Tra queste figurano:
Ricerca e recupero: utilizzate per localizzare attrezzature affondate, velivoli precipitati o resti in seguito a incidenti marittimi. I modelli di ricerca possono essere pre-programmati o guidati dall’operatore.
Identificazione delle minacce: impiegato per ispezionare oggetti sconosciuti o potenzialmente pericolosi attaccati agli scafi delle navi, ai moli o alle installazioni sul fondale marino.
Monitoraggio delle infrastrutture: applicato nelle valutazioni di routine e situazionali di strutture portuali militari, cavi sottomarini e dighe.
Analisi forense subacquea: utilizzata per documentare scene del crimine sommerse o siti di impatto con sensori e immagini ad alta fedeltà.
Ispezioni di sicurezza: impiegata per individuare punti di accesso non autorizzati, violazioni dello scafo o anomalie fisiche nelle zone di sicurezza.
Valutazione della manutenzione: facilita le valutazioni delle condizioni delle risorse navali e delle strutture sottomarine senza interrompere le operazioni.
Queste funzioni riducono i ritardi operativi, mitigano l’esposizione dei subacquei e contribuiscono a una valutazione accurata delle minacce e ai flussi di lavoro di manutenzione delle risorse.
Tipi di piattaforme di ispezione subacquea
A seconda della profondità, del terreno e del profilo della missione, vengono utilizzate diverse categorie di piattaforme subacquee:
ROV di ispezione
Veicolo di ispezione Bayonet 350 di Greensea IQ
I veicoli telecomandati (ROV) sono piattaforme sommergibili collegate via cavo e pilotate da una stazione di superficie. I ROV di classe ispezione sono in genere leggeri e compatti, in grado di manovrare in spazi ristretti o pieni di detriti. Possono includere sonar, bracci manipolatori e telecamere ad alta risoluzione. I ROV sono spesso utilizzati nelle ispezioni degli scafi, nelle operazioni di pulizia dei porti e nelle valutazioni strutturali delle infrastrutture sommerse.
Robot di ispezione
I robot subacquei autonomi o semi-autonomi sono configurati per missioni di rilevamento pianificate in anticipo o per il monitoraggio delle condizioni. Queste unità includono generalmente sistemi di alimentazione di bordo, moduli di navigazione e array di sensori. Sono adatti a coprire aree più estese dove il controllo diretto tramite cavo non è pratico, come il rilevamento di percorsi, la ricognizione di campi minati o il monitoraggio continuo di installazioni sottomarine.
Veicoli cingolati anfibi
I veicoli cingolati con capacità anfibie operano sia sulla terraferma che sott’acqua, supportando attività nelle zone intertidali e in ambienti con acque poco profonde. Queste piattaforme vengono impiegate per ispezionare fondazioni di ponti, strutture portuali e dighe poco profonde. Il loro design consente la mobilità su terreni sottomarini irregolari e su superfici asciutte senza richiedere un nuovo dispiegamento.
Crawler sottomarini
Questi veicoli aderiscono alle superfici utilizzando magneti o ventose, consentendo un’ispezione dettagliata di strutture verticali come scafi e pareti di dighe. I crawler garantiscono un movimento stabile lungo superfici fisse e possono operare in presenza di forti correnti o in zone a bassa visibilità. Sono spesso dotati di sensori, luci e sistemi video per un esame dettagliato delle infrastrutture.
Componenti e funzionalità del sistema
Ogni sistema di ispezione subacquea integra una combinazione di sottosistemi meccanici, ottici, acustici ed elettronici, tra cui:
Ispezione sottomarina Bayonet 250 di Greensea IQ
Sistemi di navigazione: I sistemi di navigazione inerziale (INS), il posizionamento acustico (USBL) e i log di velocità Doppler (DVL) vengono utilizzati per il tracciamento della posizione in tempo reale in ambienti privi di GPS.
Carichi utili dei sensori: Questi possono includere sonar di imaging, sensori acustici, scanner laser, sensori di pressione e magnetometri per raccogliere dati multidimensionali sull’ambiente e sulle strutture.
Mobilità e propulsione: propulsori, cingoli o sistemi di propulsione ibridi consentono il movimento nell’acqua o sul fondale marino. Alcuni veicoli includono moduli di galleggiabilità attivi per regolare la profondità.
Strumenti di ispezione visiva: telecamere (monocromatiche, a colori, per condizioni di scarsa illuminazione), scanner a linea laser e illuminazione a LED supportano la documentazione in ambienti torbidi o con scarsa visibilità.
Sistemi di manipolazione: è possibile aggiungere bracci robotici, manipolatori e pinze per l’interazione con oggetti sott’acqua o per il campionamento fisico.
Comunicazione e alimentazione: i veicoli possono essere alimentati tramite cavi ombelicali o batterie interne e utilizzano modem di comunicazione o fibre ottiche per il trasferimento dei dati alla stazione di controllo.
Registrazione dei dati: I registratori di bordo consentono l’analisi offline, mentre la telemetria in tempo reale permette di prendere decisioni in tempo reale durante le missioni.
Standard militari e industriali pertinenti
Le apparecchiature di ispezione subacquea utilizzate in applicazioni di difesa devono essere conformi a standard ingegneristici e operativi che garantiscano affidabilità, sicurezza e interoperabilità. Questi includono:
MIL-STD-810: Descrive in dettaglio le procedure di prova relative alle sollecitazioni ambientali, tra cui temperature estreme, corrosione da acqua salata e condizioni di pressione subacquea.
MIL-STD-1474 e MIL-STD-461: Trattano i limiti di rumore e la compatibilità elettromagnetica relativi ai sistemi navali e sottomarini.
STANAG 1364: Stabilisce i requisiti di interoperabilità per i ROV e i sistemi sottomarini nell’ambito delle operazioni NATO.
IMCA R 002 / R 004: Linee guida sul funzionamento sicuro, la certificazione e la manutenzione di veicoli telecomandati e autonomi nei settori industriale e della difesa.
IEEE 1451: Fornisce un’interfaccia standardizzata per il collegamento di sensori e trasduttori ai sistemi di acquisizione dati.
Confronto operativo e considerazioni
Rispetto alle ispezioni effettuate da subacquei, le piattaforme subacquee robotizzate offrono una maggiore durata operativa, una maggiore ripetibilità e una maggiore sicurezza. I limiti possono includere l’accesso fisico in spazi molto ristretti o la necessità di operatori qualificati e di supporto logistico. Queste piattaforme possono migliorare significativamente l’accuratezza dei dati e la sicurezza delle missioni se combinate con operazioni guidate da subacquei.
I principali compromessi operativi includono:
Mobilità vs stabilità: i ROV a nuoto libero e gli UUV (veicoli subacquei senza equipaggio) offrono una copertura più esaustiva, ma possono essere più influenzati dalla corrente rispetto ai crawler cingolati.
Autonomia vs controllo: le unità autonome riducono il coinvolgimento umano ma richiedono una pianificazione pre-missione e sistemi di sicurezza affidabili.
Carico dei sensori vs autonomia: carichi utili dei sensori più elevati possono ridurre la durata della missione a causa dell’aumento del consumo energetico e della resistenza aerodinamica.
La scelta della piattaforma di ispezione appropriata dipende dai parametri specifici della missione, dall’infrastruttura di dispiegamento disponibile e dai fattori ambientali.
Tendenze emergenti nell’ispezione subacquea per la difesa
I progressi tecnologici stanno influenzando le capacità di ispezione subacquea di prossima generazione. Le attuali aree di sviluppo includono:
Rilevamento distribuito: dispiegamento di micro-ROV o mini-ROV coordinati che conducono ispezioni parallele con sistemi di controllo condivisi.
Analisi basate sull’intelligenza artificiale: elaborazione a bordo per il riconoscimento degli oggetti, il rilevamento di anomalie strutturali e gli adeguamenti alla pianificazione della missione.
Sistemi energetici avanzati: composizioni chimiche delle batterie migliorate e moduli di alimentazione ibridi per estendere l’autonomia subacquea e il tempo di funzionamento dei sensori.
Comunicazione integrata: utilizzo di modem di comunicazione cross-domain per collegare i sistemi subacquei con UAV e navi di superficie per una consapevolezza situazionale unificata.
Progetti modulari compatti: enfasi su unità di ispezione modulari e facilmente dispiegabili, che possono essere riconfigurate per diversi tipi di missione con modifiche hardware minime.
Mentre l’ispezione subacquea continua ad evolversi, gli operatori della difesa stanno incorporando queste tecnologie in contesti più ampi di sicurezza marittima, tra cui le contromisure antimine, la sorveglianza subacquea e la protezione delle infrastrutture.