



Inertial Navigation Systems (INS)
Discover cutting-edge solutions from 8 leading global suppliersHBK’s latest inertial navigation system, the 3DM-CV7-INS, offers a versatile external measurement aiding interface that enhances performance during GNSS outages.
As autonomous robots are increasingly deployed in challenging settings, their inertial navigation systems must offer heightened robustness and reliability, particularly under GNSS-denied or degraded conditions.
Standard GNSS/INS setups often do not meet these stringent performance demands, necessitating supplementary aiding sensors.
The 3DM-CV7-INS aiding interface supports conventional navigation inputs, like GNSS position and velocity, as well as more robotics-oriented data such as body-frame velocity and wheel speed.
While optical sensors like cameras and LiDAR have traditionally been used in robotic navigation, advancements in mmWave radar technology have positioned radar as a valuable alternative.
Radar’s simplicity, solid-state design, and resilience against environmental interference—such as smoke or fog—make it an ideal choice. Integrating the CV7-INS with radar-based velocity measurements significantly bolsters navigation performance during GNSS outages, addressing the increasing demand for reliable navigation in environments that may challenge standard GNSS/INS systems.
An example of a system that combines radar velocity aiding with a CV7-INS is detailed below. The code for this project is open-source.
CV7-INS Basics
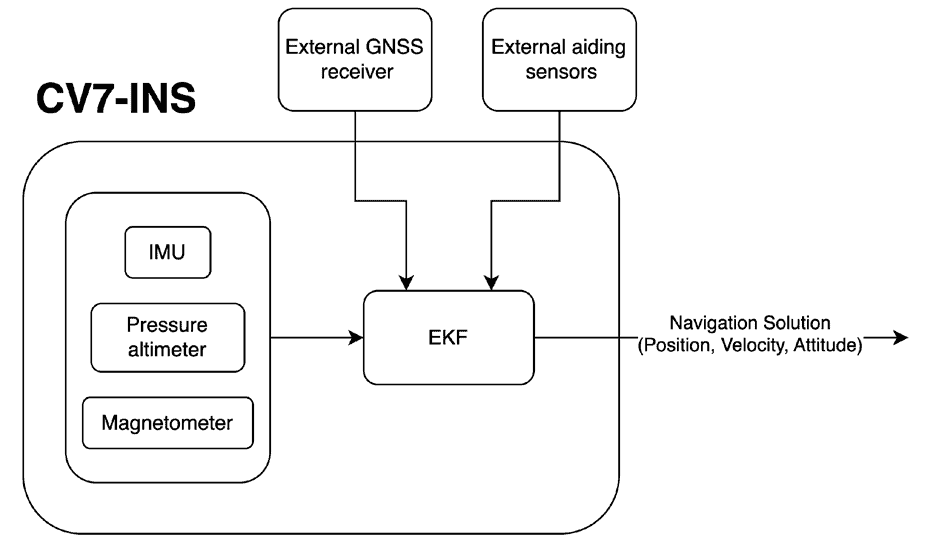
The MicroStrain CV7-INS is an embeddable, tactical-grade inertial navigation system that can incorporate external aiding measurements, such as GNSS position and velocity, through its onboard Extended Kalman Filter.
This filter fuses information from the system’s internal sensors—including an IMU, pressure sensor, and magnetometer—with time-synchronized data from external sensors like a GNSS receiver. Beyond traditional GNSS-based measurements like global position and velocity, the CV7 supports a 3D body-frame velocity aiding measurement.
CV7-INS Architecture
This example demonstrates the integration with a radar velocity sensor, though the aiding measurement could also be produced by other navigation sensors, such as lidar or visual odometry, optical flow, or wheel speed.
System Architecture
A CV7-INS unit is integrated with a u-Blox ZED-F9P GNSS receiver and a Smartmicro DRVEGRD 152 automotive radar sensor via a ROS2 interface. The GNSS receiver delivers global position and velocity data, while the radar outputs raw 4D point clouds (x, y, z, speed). The radar point clouds are first transformed into 3D body-frame velocity measurements before being passed to the CV7-INS. This combined system is installed on an automotive testing platform and used in a suburban setting.
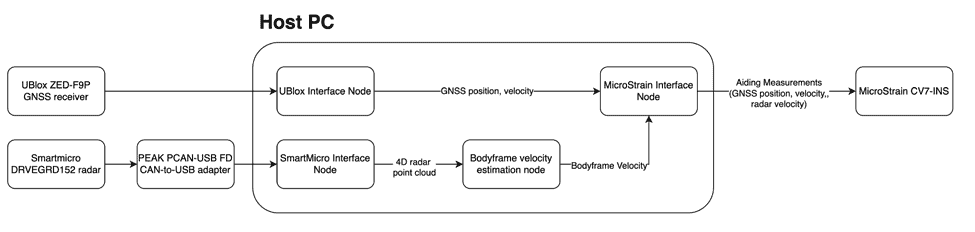
Test System Architecture
Radar Preprocessing
Before processing by the CV7-INS navigation filter, radar point clouds need to be condensed into a more suitable navigation aiding measurement. The Cartesian position and radial speed of each tracked radar target are used to calculate a body-frame velocity from each radar point cloud. A nonlinear least-squares solver then estimates a body-frame velocity measurement along with its associated measurement covariance. Robust error models are utilized to minimize the effects of outliers and dynamic obstacles in the environment.
Radar Velocity Accuracy
To assess radar velocity accuracy, a dual-antenna, RTK-enabled MicroStrain GQ7-GNSS/INS was used as the ground truth reference system. Due to the distribution of point cloud data along the vehicle’s X-axis, Y- and Z-axis velocity observability is limited, reducing accuracy along these axes.
Body-frame axis Accuracy (m/s):
- X: 0.09
- Y: 0.16
- Z: 0.35
Performance
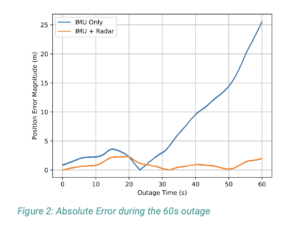
To evaluate the advantages of radar velocity aiding in GNSS-denied scenarios, GNSS outages were simulated in post-processing. A sequence of 60-second GNSS outages was simulated to generate a statistical estimate of performance during these outages.
Using the exact EKF algorithm as the real-time CV7-INS, the data was reprocessed ten times with different GNSS outage windows. Figures 1, 2, and 3 illustrate the navigation performance from one of these simulated outage scenarios.
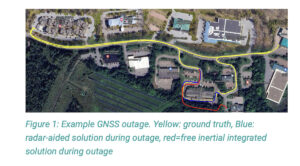
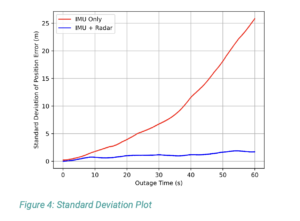
 The performance during an outage was defined as the standard deviation of position error at each time step. Figure 4 shows the lateral navigation performance for both sensor configurations, with radar aiding providing a 93% improvement in navigation performance during GNSS outages compared to the inertial-only solution.
The performance during an outage was defined as the standard deviation of position error at each time step. Figure 4 shows the lateral navigation performance for both sensor configurations, with radar aiding providing a 93% improvement in navigation performance during GNSS outages compared to the inertial-only solution.
For outage performance at various time intervals:
- 10 seconds: IMU only – 1.77 m; IMU + radar – 0.72 m
- 30 seconds: IMU only – 6.74 m; IMU + radar – 1.15 m
- 60 seconds: IMU only – 25.84 m; IMU + radar – 1.72 m
This example demonstrates that incorporating radar velocity measurements into the CV7-INS navigation filter can enhance navigation performance by up to 93% during GNSS outages, compared to free inertial integration.
As the demand for dependable robotic navigation systems grows, the flexible aiding interface of the CV7-INS can boost navigation performance in robotic applications where traditional GNSS/INS systems may be insufficient.










