Adquiera software de fusión multitrayectoria de proveedores y fabricantes líderes para aplicaciones de defensa que impliquen fusión de sensores, seguimiento por radar, operaciones multidominio y entornos de mando y control. Estas soluciones admiten un seguimiento mejorado de objetivos, fusión de radares y conciencia situacional integrada en operaciones aéreas, terrestres, marítimas y conjuntas.
Si diseñas, construyes o suministras Software de fusión multitrayectoria, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
El software de fusión multicanal ofrece una visión operativa unificada al combinar datos de radar, ópticos, infrarrojos, acústicos, ADS-B, AIS y otras entradas de sensores en trazas coherentes. Permite la defensa aérea y antimisiles integrada, la vigilancia del espacio aéreo, el seguimiento de UAV y un mayor conocimiento de la situación en el campo de batalla, al reducir la ambigüedad y aumentar la confianza en la identificación de objetivos en entornos multidominio.
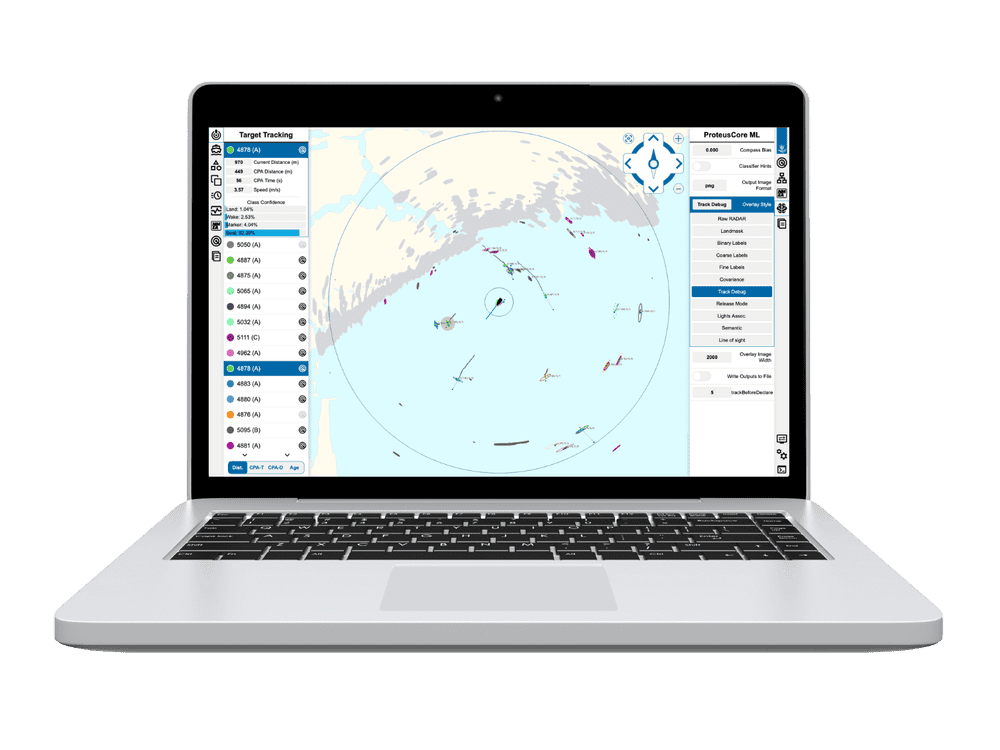
Fusor multitrayectoria de Sunhillo.
Estas plataformas utilizan estimación de estado avanzada, algoritmos de seguimiento y técnicas de asociación de datos para procesar datos de seguimiento, formatos de trazado y mediciones a nivel de características procedentes de sensores distribuidos. Los procesadores de fusión centralizados proporcionan un control unificado para grandes redes de defensa, mientras que los nodos de fusión distribuidos admiten operaciones escalables y resilientes. En conjunto, generan rastros fusionados de alta integridad que minimizan las falsas alarmas, mejoran la continuidad para objetivos en maniobra o de baja observabilidad, y optimizan la toma de decisiones para los sistemas de mando y control (C2).
Aplicaciones en operaciones de defensa
El software de fusión de trazas múltiples se implementa en una amplia gama de aplicaciones de defensa en las que es esencial un conocimiento de la situación de alta fiabilidad. Entre los casos de uso clave se incluyen:
Defensa aérea y antimisiles integrada para la correlación de sensores de radar y sistemas de detección de amenazas
Supervisión del espacio aéreo con ADS-B e integración del seguimiento por radar
Conocimiento del dominio marítimo con receptores AIS y fusión de radares
Seguimiento multiobjetivo para el seguimiento de UAV, el seguimiento de guerra electrónica y la vigilancia terrestre
Sistemas C2 que requieren información de seguimiento fiable y consolidada para la planificación de operaciones y la toma de decisiones de intervención
Estos sistemas mejoran la precisión de la selección de objetivos, reducen la carga de trabajo del operador y facilitan respuestas coordinadas en los ámbitos terrestre, aéreo, marítimo y espacial.
Tipos de enfoques de fusión multitrayectoria
Las diferentes metodologías de fusión abordan requisitos operativos y de sensores específicos. Entre los tipos más comunes se incluyen:
Fusión de trayectoria a trayectoria
Este enfoque fusiona rastros procesados procedentes de múltiples sensores de radar, sensores EO IR o algoritmos de seguimiento. Mantiene la independencia de los sensores, reduce la carga de procesamiento y mejora la coherencia.
Fusión sensor-pista
Las mediciones brutas de los sensores, tales como trazados, detecciones y datos de alcance-ángulo, se fusionan a nivel de medición. Esto permite al procesador de fusión generar estimaciones de estado de mayor precisión utilizando sus propios modelos de estimación.
Fusión a nivel de decisión
Las salidas de múltiples sistemas de fusión, sistemas C2 o plataformas de inteligencia se consolidan en evaluaciones de alto nivel, como clasificaciones de amenazas o evaluaciones de intenciones. Este enfoque respalda la toma de decisiones estratégicas en entornos conjuntos.
Fusión a nivel de características
Las características de los sensores, incluyendo la intensidad de la señal, las firmas espectrales o las características IR, se combinan con la lógica de seguimiento para mejorar el reconocimiento y reducir la clasificación errónea en entornos con interferencias.
Algoritmos de seguimiento y métodos de estimación
El software de fusión multitrayectoria incorpora una gama de técnicas avanzadas de estimación y filtrado. Los métodos estándar incluyen filtros de Kalman, filtros de Kalman extendidos, filtros de Kalman no perfumados, filtros de partículas, filtros de vecino más cercano y asociación probabilística conjunta de datos. Estos algoritmos permiten un seguimiento robusto en entornos ruidosos, con objetivos en maniobra o con lagunas en los sensores.
Los estimadores de estado generan estimaciones de posición, velocidad y aceleración para cada seguimiento mediante la integración de observaciones procedentes de sensores de radar, ópticos, infrarrojos, lidar y acústicos. La estimación adaptativa permite un rendimiento constante en diversas condiciones, incluyendo interferencias, interferencias de fondo y maniobras rápidas de los objetivos.
Arquitecturas e integración de sistemas
Las arquitecturas de fusión deben ajustarse a los requisitos de la misión, los sensores disponibles y las estructuras de mando. Entre las arquitecturas típicas se incluyen:
Procesadores de fusión centralizados
Proporcionan un procesamiento unificado para sistemas que requieren una gestión sincronizada de las pistas y un compromiso coordinado en múltiples dominios.
Nodos de fusión distribuidos
Funcionan a nivel de sensor o de plataforma para reducir la latencia, aumentar la redundancia y respaldar la toma de decisiones descentralizada en entornos conflictivos.
Motores de fusión jerárquicos
Combinan modelos centralizados y distribuidos para equilibrar el rendimiento, la resiliencia y la escalabilidad en grandes teatros de operaciones.
Pilas de fusión modulares
Permiten la integración con sistemas heredados de radar, C2 y conciencia situacional a través de adaptadores modulares e interfaces estandarizadas.
Comparaciones y factores de rendimiento
A la hora de evaluar plataformas de fusión multirastreo, las organizaciones de defensa tienen en cuenta varios criterios:
Consistencia de las pistas y rendimiento de la correlación
Latencia de los datos y eficiencia computacional
Compatibilidad de los sensores e interoperabilidad entre dominios
Compatibilidad de los algoritmos con escenarios de seguimiento avanzados
Integración con el seguimiento por radar, los sistemas AIS, los receptores ADS-B y los sensores EO IR
El rendimiento debe mantenerse en diversos tipos de sensores y condiciones operativas, incluyendo interferencias marítimas, tráfico aéreo denso y operaciones terrestres complejas.
Normas pertinentes e interoperabilidad
Los sistemas de fusión multitrayectoria se basan en normas militares establecidas para garantizar la interoperabilidad entre plataformas y socios de la coalición. Entre ellas pueden figurar:
Especificaciones STANAG para el formato de seguimiento y trazado conforme a la OTAN
Normas de interfaz del sistema C2 que rigen la mensajería, la lógica de correlación y la gestión de seguimientos
Modelos de datos estructurados para sistemas integrados de defensa aérea y antimisiles y operaciones multidominio
El cumplimiento de estas normas garantiza una comunicación fiable, una asociación coherente de seguimientos y una integración perfecta con las estructuras de mando conjuntas.
Ventajas operativas
El software de fusión multitrayectoria mejora el conocimiento de la situación al proporcionar trayectorias consistentes y de alta fiabilidad generadas a partir de entradas multisensor. Esto mejora la detección de amenazas, la precisión en la selección de objetivos y la toma de decisiones en entornos operativos exigentes. Al admitir la integración multidominio y mantener la fiabilidad de las trayectorias en diversas redes de sensores, estos sistemas desempeñan un papel fundamental en las operaciones de defensa modernas.