Beziehen Sie Multi-Track-Fusionssoftware von führenden Anbietern und Herstellern für Verteidigungsanwendungen, die Sensorfusion, Radarverfolgung, Multi-Domain-Operationen sowie Führungs- und Kontrollumgebungen umfassen. Diese Lösungen unterstützen eine verbesserte Zielverfolgung, Radarfusion und integrierte Lageerfassung bei Luft-, Land-, See- und gemeinsamen Operationen.
Wenn Sie entwerfen, bauen oder liefern Multi-Track-Fusion-Software, Erstellen Sie ein Profil, um Ihre Kompetenzen zu präsentieren und mit Besuchern in Kontakt zu treten, die einen konkreten Bedarf an Ihren Lösungen haben.
Software zur Mehrspur-Fusion liefert ein einheitliches Lagebild, indem sie Radar-, optische, Infrarot-, akustische, ADS-B-, AIS- und andere Sensordaten zu kohärenten Zielspuren. Sie unterstützt die integrierte Luft- und Raketenabwehr, die Luftraumüberwachung, die UAV-Verfolgung sowie ein umfassenderes Lagebild auf dem Schlachtfeld, indem sie Unklarheiten reduziert und die Zuverlässigkeit der Zielidentifizierung in domänenübergreifenden Umgebungen erhöht.
[Bildunterschrift id=“attachment_92361″ align=“alignright“ width=“323″] Multi-Track-Fuser von Sunhillo.[/caption]
Diese Plattformen nutzen fortschrittliche Zustandsschätzung, Verfolgungsalgorithmen und Datenzuordnungsverfahren, um Spurdaten, Kartierungsformate und Messungen auf Merkmalsebene von verteilten Sensoren zu verarbeiten. Zentralisierte Fusionsprozessoren bieten eine einheitliche Steuerung für große Verteidigungsnetzwerke, während verteilte Fusionsknoten skalierbare, widerstandsfähige Operationen unterstützen. Gemeinsam erzeugen sie hochintegrierte fusionierte Zielspuren, die Fehlalarme minimieren, die Kontinuität bei manövrierenden oder schwer erkennbaren Zielen verbessern und die Entscheidungsfindung für Kommando- und Kontrollsysteme (C2) optimieren.
Anwendungen in Verteidigungsoperationen
Software zur Multi-Track-Fusion wird in einer Vielzahl von Verteidigungsanwendungen eingesetzt, in denen eine hochzuverlässige Lageerfassung unerlässlich ist. Zu den wichtigsten Anwendungsfällen gehören:
Integrierte Luft- und Raketenabwehr zur Korrelation von Radarsensoren und Bedrohungserkennungssystemen
Luftraumüberwachung mit ADS-B und integrierter Radarverfolgung
Maritime Lageerfassung mit AIS-Empfängern und Radarfusion
Mehrzielverfolgung für die UAV-Verfolgung, EW-Verfolgung und Bodenüberwachung
C2-Systeme, die zuverlässige, konsolidierte Verfolgungsdaten für die Einsatzplanung und Einsatzentscheidungen benötigen
Diese Systeme verbessern die Zielgenauigkeit, reduzieren die Arbeitsbelastung des Bedieners und unterstützen koordinierte Reaktionen über Land-, Luft-, See- und Weltraumdomänen hinweg.
Arten von Ansätzen zur Mehrziel-Fusion
Verschiedene Fusionsmethoden erfüllen spezifische operative und sensorische Anforderungen. Zu den gängigen Arten gehören:
Track-to-Track-Fusion
Dieser Ansatz führt verarbeitete Zielverfolgungsdaten von mehreren Radarsensoren, EO-IR-Sensoren oder Verfolgungsalgorithmen zusammen. Er bewahrt die Sensorunabhängigkeit, reduziert die Verarbeitungslast und verbessert die Konsistenz.
Sensor-zu-Spur-Fusion
Rohdaten von Sensormessungen, wie z. B. Plots, Erkennungen und Entfernungs-Winkel-Daten, werden auf Messungsebene fusioniert. Dies ermöglicht es dem Fusionsprozessor, mithilfe eigener Schätzmodelle genauere Zustandsschätzungen zu generieren.
Fusion auf Entscheidungsebene
Die Ergebnisse mehrerer Fusionssysteme, C2-Systeme oder Informationsplattformen werden zu übergeordneten Bewertungen wie Bedrohungsklassifizierungen oder Absichtsbewertungen zusammengefasst. Dieser Ansatz unterstützt die strategische Entscheidungsfindung in gemeinsamen Umgebungen.
Fusion auf Merkmalsebene
Sensoreigenschaften, darunter Signalstärke, spektrale Signaturen oder IR-Merkmale, werden mit Verfolgungslogik kombiniert, um die Erkennung zu verbessern und Fehlklassifizierungen in unübersichtlichen Umgebungen zu reduzieren.
Verfolgungsalgorithmen und Schätzverfahren
Software zur Multi-Track-Fusion umfasst eine Reihe fortschrittlicher Schätz- und Filtertechniken. Zu den Standardmethoden gehören Kalman-Filter, erweiterte Kalman-Filter, unscented Kalman-Filter, Partikelfilter, Nearest-Neighbor-Filter und die gemeinsame probabilistische Datenassoziation. Diese Algorithmen ermöglichen eine robuste Verfolgung in störungsbehafteten Umgebungen, bei manövrierenden Zielen oder bei Sensorlücken.
Zustandsschätzer generieren Positions-, Geschwindigkeits- und Beschleunigungsschätzungen für jede Spur, indem sie Beobachtungen von Radar-, optischen, Infrarot-, Lidar- und akustischen Sensoren integrieren. Die adaptive Schätzung ermöglicht eine konsistente Leistung unter vielfältigen Bedingungen, einschließlich Störsignalen, Störsignalen und schnellen Zielmanövern.
Architekturen und Systemintegration
Fusionsarchitekturen müssen auf Missionsanforderungen, verfügbare Sensoren und Kommandostrukturen abgestimmt sein. Typische Architekturen umfassen:
Zentralisierte Fusionsprozessoren
Bieten eine einheitliche Verarbeitung für Systeme, die ein synchronisiertes Zielverfolgungsmanagement und koordinierte Eingriffe über mehrere Domänen hinweg erfordern.
Verteilte Fusionsknoten
Arbeiten auf Sensor- oder Plattformebene, um Latenzzeiten zu reduzieren, die Redundanz zu erhöhen und dezentrale Entscheidungsfindung in umkämpften Umgebungen zu unterstützen.
Hierarchische Fusions-Engines
Kombinieren zentralisierte und verteilte Modelle, um Leistung, Ausfallsicherheit und Skalierbarkeit über große Einsatzgebiete hinweg auszugleichen.
Modulare Fusionsstacks
Ermöglichen die Integration mit älteren Radar-, C2- und Situationserkennungssystemen über modulare Adapter und standardisierte Schnittstellen.
Vergleiche und Leistungsfaktoren
Bei der Bewertung von Multi-Track-Fusionsplattformen berücksichtigen Verteidigungsorganisationen mehrere Kriterien:
Konsistenz der Zielverfolgung und Korrelationsleistung
Datenlatenz und Recheneffizienz
Sensorkompatibilität und Domänen-Interoperabilität
Algorithmusunterstützung für fortgeschrittene Verfolgungsszenarien
Integration mit Radarverfolgung, AIS-Systemen, ADS-B-Empfängern und EO-IR-Sensoren
Die Leistung muss über verschiedene Sensortypen und Einsatzbedingungen hinweg aufrechterhalten werden, einschließlich maritimer Störsignale, dichten Flugverkehrs und komplexer Landoperationen.
Relevante Standards und Interoperabilität
Multi-Track-Fusionssysteme stützen sich auf etablierte militärische Standards, um die Interoperabilität zwischen Plattformen und Koalitionspartnern sicherzustellen. Dazu können gehören:
MIL-STD-Nachrichtenformate für den Austausch von Radar- und Sensordaten
STANAG-Spezifikationen für NATO-konforme Formate zur Spur- und Plottdarstellung
C2-Systemschnittstellenstandards für Nachrichtenübermittlung, Korrelationslogik und Spurverwaltung
Strukturierte Datenmodelle für integrierte Luft- und Raketenabwehrsysteme sowie Multi-Domain-Operationen
Die Einhaltung dieser Standards gewährleistet eine zuverlässige Kommunikation, eine kohärente Spurzuordnung und eine nahtlose Integration in gemeinsame Kommandostrukturen.
Operative Vorteile
Multi-Track-Fusionssoftware verbessert das Lagebild, indem sie konsistente, hochzuverlässige Zielverfolgungen liefert, die aus Multisensor-Eingaben generiert werden. Dies verbessert die Bedrohungserkennung, die Zielgenauigkeit und die Entscheidungsfindung in anspruchsvollen Einsatzumgebungen. Durch die Unterstützung der Multi-Domain-Integration und die Aufrechterhaltung der Verfolgungszuverlässigkeit über verschiedene Sensornetzwerke hinweg spielen diese Systeme eine entscheidende Rolle in modernen Verteidigungsoperationen.



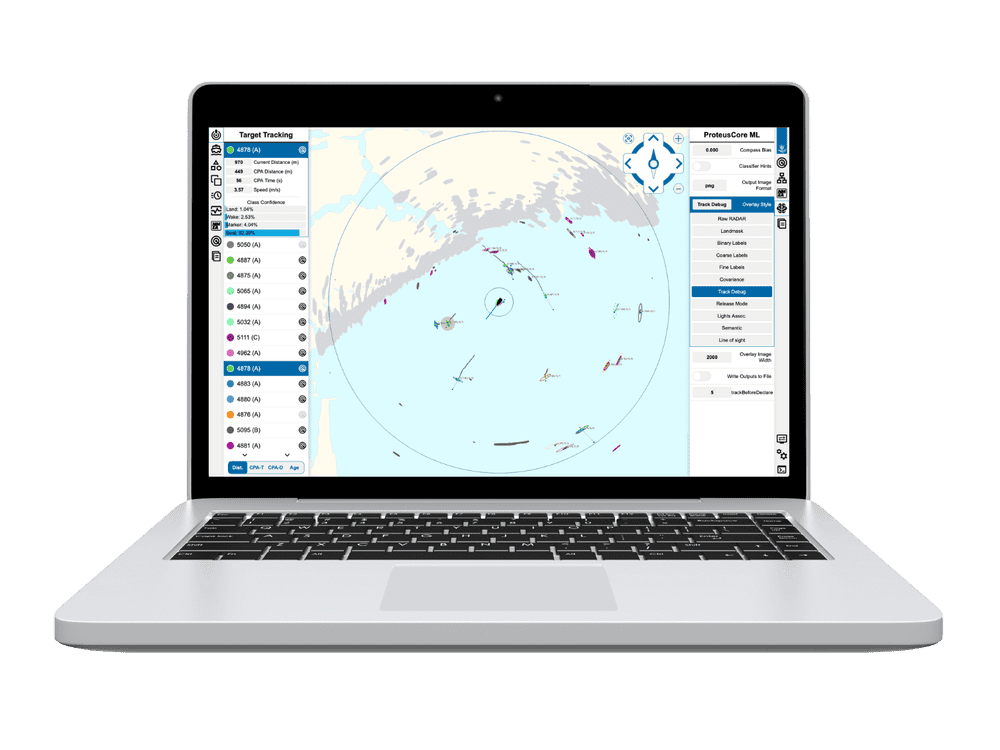

 Multi-Track-Fuser von Sunhillo.[/caption]
Multi-Track-Fuser von Sunhillo.[/caption]



