BLOS Communications
Discover cutting-edge solutions from 4 leading global suppliers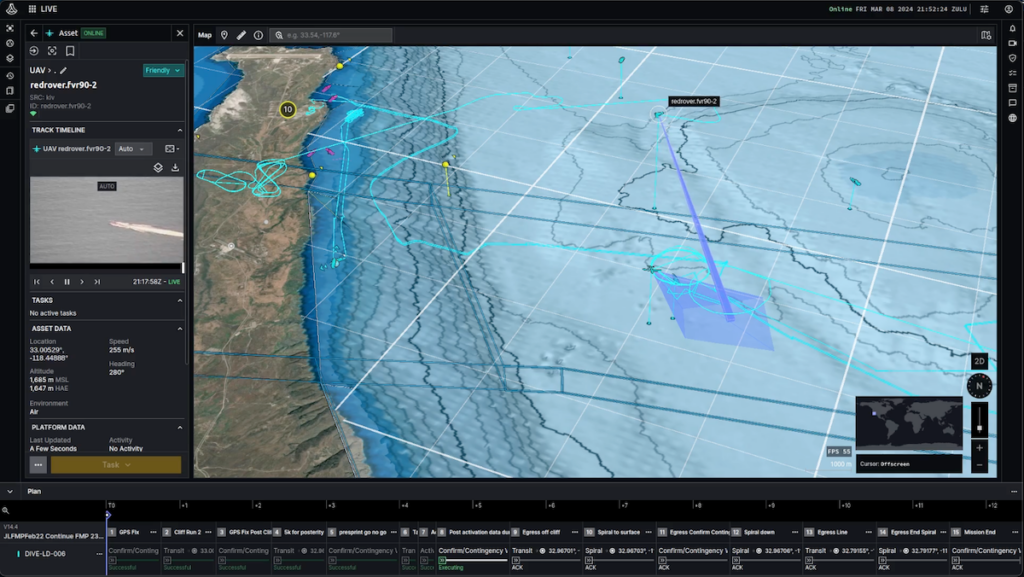
The Lattice software from Anduril has proved effective when serving as the primary mission management platform for the U.S. Navy’s Integrated Battle Problem 24.1 (IBP 24.1) exercise, which took place across the Southern California Offshore Range.
Lattice, an open AI-enabled software platform that fuses various data sources and assets into an intelligent common operating picture, was integrated with more than a dozen Anduril platforms, partner platforms and data sources for the exercise.
Lattice
Anduril state that Lattice served as the primary software solution to integrate, network, and command and control teams of heterogeneous unmanned vehicles across air, sea, and sub-sea from a single intelligent common operating picture.
During IBP 24.1, more than 100 geographically distributed operators leveraged Lattice to successfully achieve multi-domain mission objectives that spanned the dynamic targeting sequence of find, fix, track, target, engage, and assess.
To achieve mission success, Anduril and partner organizations leveraged Lattice’s open APIs and software development kit to quickly integrate seven uncrewed surface vessel (USV) variants, three unmanned aerial vehicle (UAV) variants, one autonomous underwater vehicle (AUV), and multiple commercial data feeds into Lattice. In addition to Lattice integrations, Anduril also deployed Lattice onto multiple partner platforms, which then served as additional nodes to further bolster Lattice’s secure data mesh network and ensure resilient communications beyond-line-of-sight (BLOS) during the exercise.
Throughout IBP 24.1, operators not only leveraged Lattice as a common operational picture, but also used Lattice to construct and execute coordinated multi-domain, multi-asset mission plans. Operators used Lattice to automate machine tasking of UxVs, adjusting their position, speed, and sensor coverage in real-time based on observations of changing battlefield conditions, demonstrating the operational utility of Lattice’s low-latency data mesh.
Anduril say that the successful demonstrations at IBP 24.1 evidence how Lattice can enable multi-domain command and control of mass effects at strategic, tactical, and operational levels.
Altius
Lattice enabled operators to verify pre-launch conditions for Altius through FMV sensor data from partner USVs, initiate the launch itself, and validate conditions post-launch. Once in the air, Altius leveraged advanced autonomy and in-flight command and control tasking via Lattice to execute simultaneous, coordinated ISR missions on moving targets in conjunction with partner assets across domains.
With multiple launches and hours of operational flight time, Anduril successfully demonstrated the flexibility, multi-domain launch, and expeditionary capabilities of the Altius family of systems at IBP 24.1.
Anduril executed multiple beyond-line-of-sight (BLOS) Altius launches from partner USVs, extending Altius’s range by providing highly-mobile, unmanned launch points in the maritime domain.
All of the Altius systems that participated in IBP 24.1 were successfully recovered for future re-use.

Dive-LD
Tasked and controlled through Lattice, Dive-LD successfully demonstrated a 120-hour end-to-end mission where Dive-LD autonomously navigated hundreds of nautical miles across demanding bathymetry, relying upon onboard vehicle compute and planning software for navigation.
Over the course of the event, operators tasked Dive-LD to navigate a series of undersea waypoints from a surface loiter, tasked multiple partner USVs to conduct high-speed navigation, executed multiple successful Altius launches from partner USVs, cued multi-domain assets based on shared targeting data, and coordinated multiple Anduril and partner systems to perform a standardized set of autonomous behaviors.

The Integrated Battle Problem 24.1 (IBP 24.1) Exercise
Led by the U.S. Pacific Fleet (PACFLT) and orchestrated by U.S. 3rd Fleet, IBP 24.1 took place off the coast of Southern California and provided the U.S. Navy with the ability to analyze, simulate, prototype, and demonstrate multi-domain unmanned systems to implement into future fleet operations. IBP 24.1 was the fourth iteration under the PACFLT Experimentation Plan, which is focused on testing and developing unmanned capabilities “above the sea, on the sea and below the sea” that contribute to a stronger naval force, further driving capabilities to significantly reduce the risk to personnel in hostile environments.