Tyto Robotics explains a structured approach to selecting and matching drone motors and propellers, addressing a critical early stage in Unmanned Aerial Vehicle (UAV) design. Read more >>
The process begins by defining Maximum Take-Off Weight (MTOW) and thrust requirements, using a Tyto Robotics example of a 25 kg quadcopter requiring approximately 12.5 kgf of thrust per propulsion unit. From this baseline, a suitable propeller is identified using performance data, followed by selection of a compatible battery configuration and motor KV rating. A motor-propeller matching calculator is then used to compare theoretical and physical maximum rotational speeds and highlight potential limitations early in the design process.
The methodology progresses through a series of calculations to evaluate propulsion performance. Maximum rotational speed is constrained by blade tip Mach number, with practical limits typically kept below Mach 0.7 to avoid compressibility losses. Based on this limit, thrust can be estimated and used to calculate electrical power requirements using assumed efficiencies in the range of 3.5 to 4 gf/W.
Mechanical power is then derived with an assumed 90% conversion efficiency, followed by calculations for voltage, current, and torque using standard relationships. This step-by-step process allows designers to determine whether a selected motor and propeller combination can meet thrust and performance targets before hardware testing.
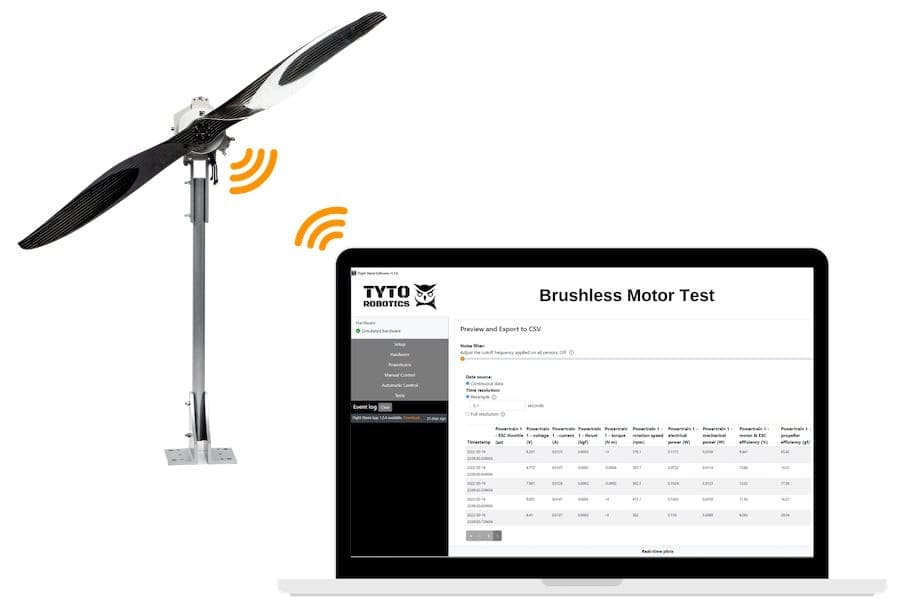
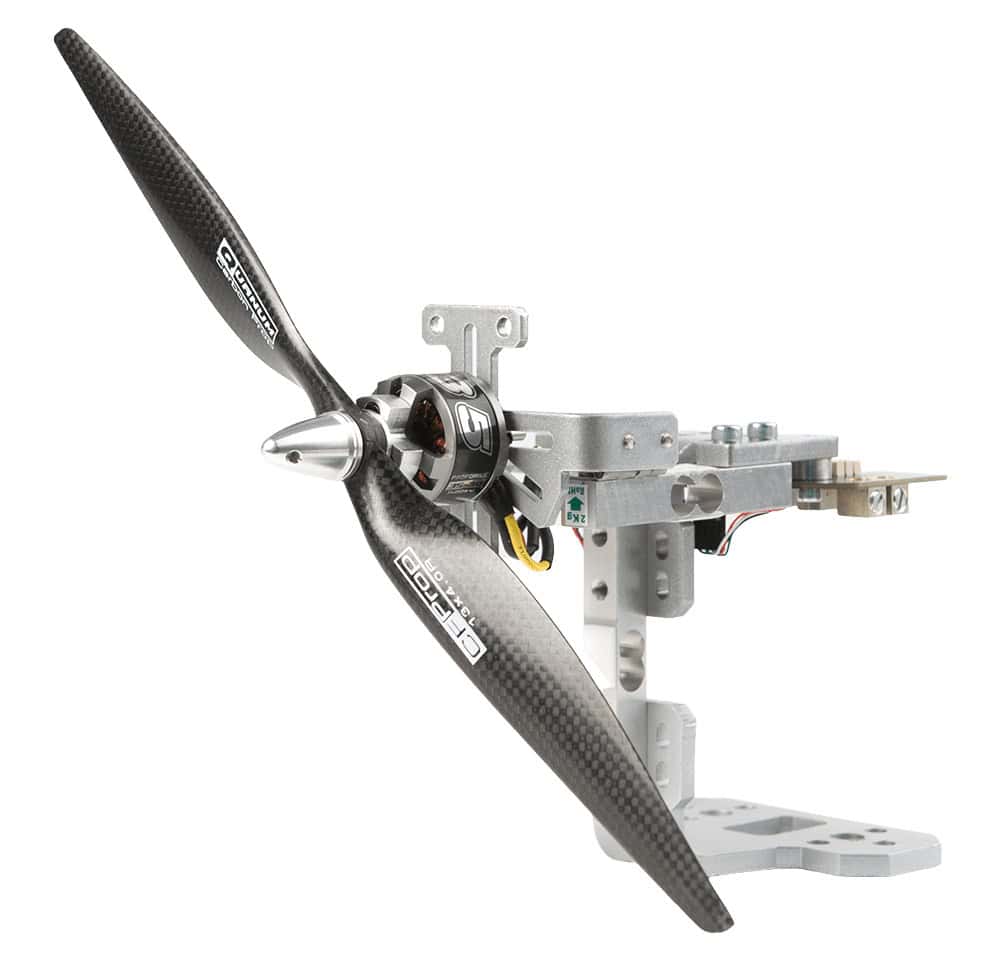
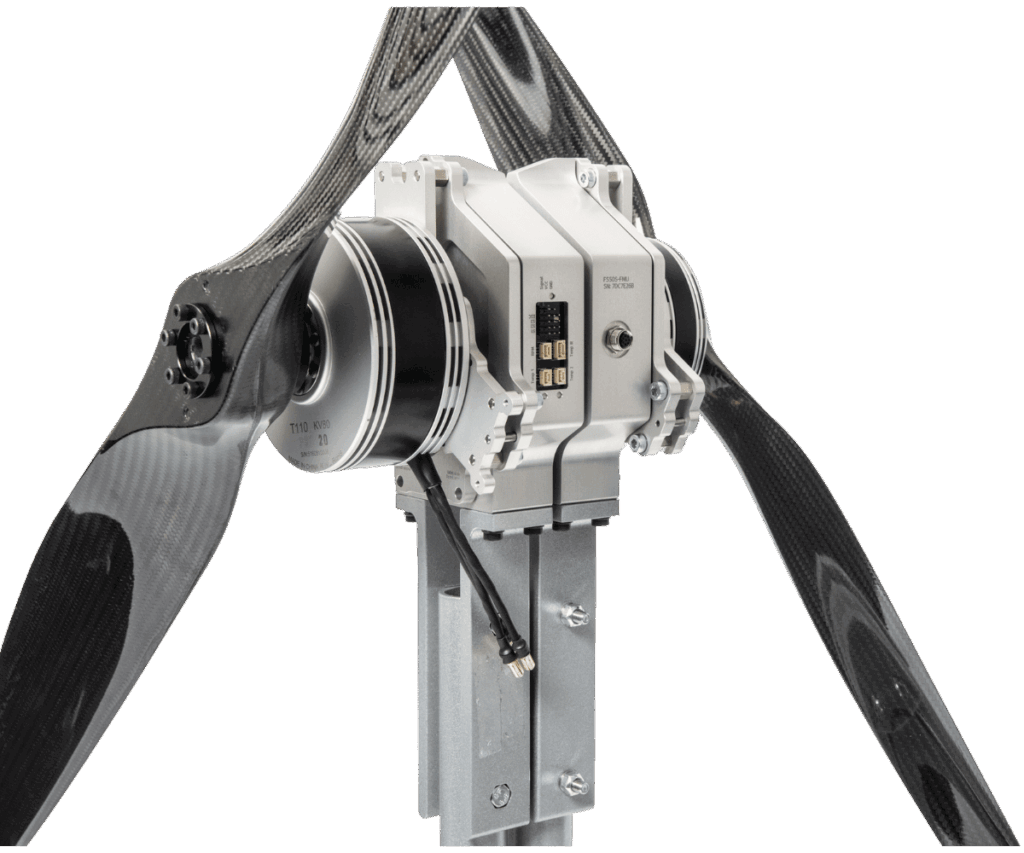
Experimental validation is used to verify and refine these theoretical predictions. Thrust stands such as the Flight Stand 50 enable measurement of thrust, torque, rotational speed, voltage, and current, and can also be used to generate motor efficiency maps by applying variable loads with different propellers or controlled airflow conditions.
Performance is assessed by aligning the peak efficiency regions of the motor and propeller, supported by analysis of torque, thrust, and efficiency curves across rotational speeds. These relationships demonstrate how motor efficiency varies with both torque and speed, requiring multiple operating conditions to be considered.
System performance can then be refined through iterative adjustments to motor KV, supply voltage, and propeller geometry. Lower KV motors paired with higher voltages can reduce current draw and electrical losses, while changes to propeller pitch and diameter directly influence thrust generation and torque demand.
Final validation requires both static and dynamic testing, as propeller behavior varies significantly with incoming airflow. By combining analytical tools with controlled testing using systems such as the Flight Stand and WindShaper, this approach reduces reliance on estimation and supports more accurate propulsion system design.