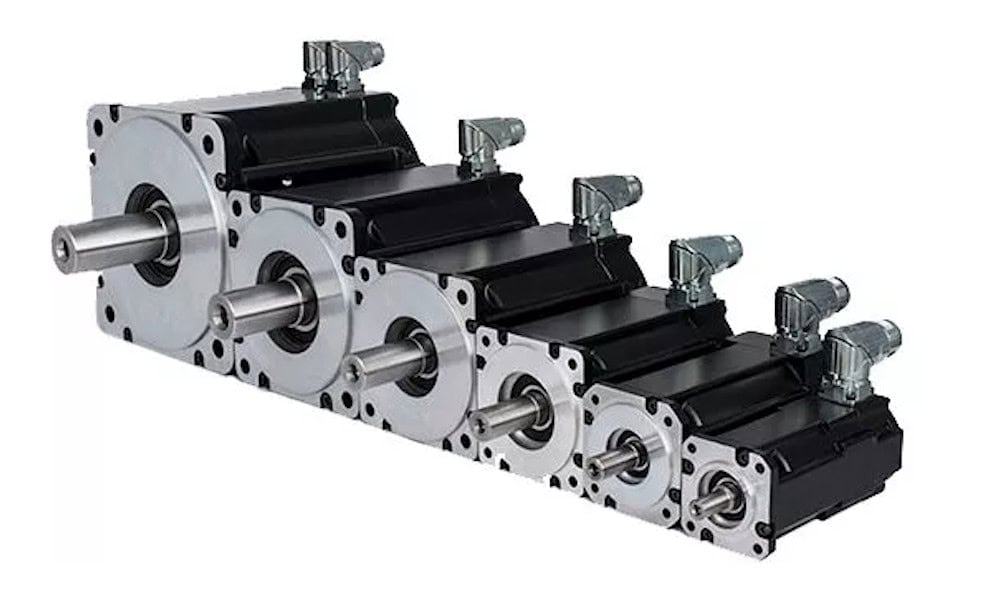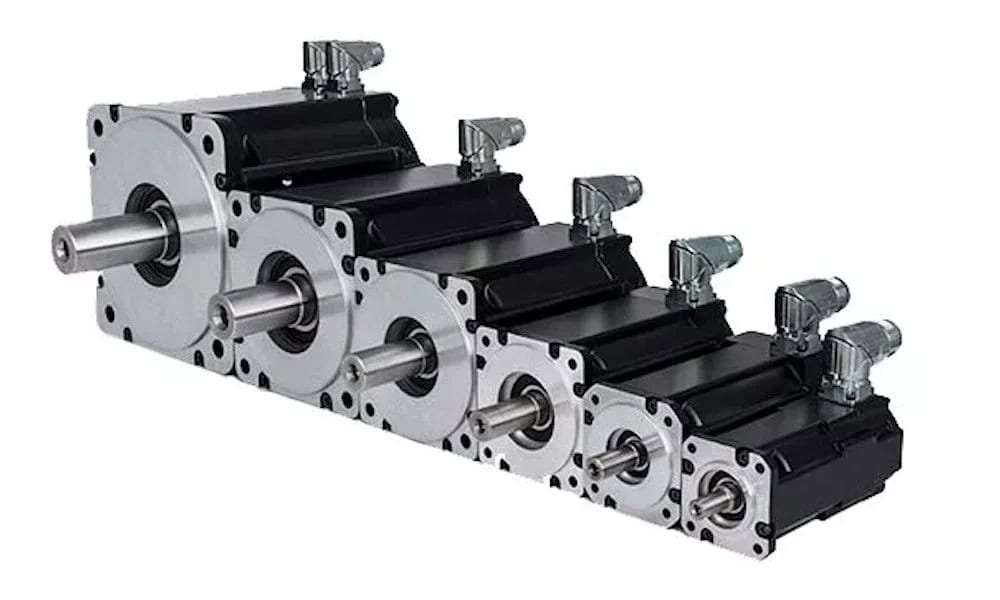
Kollmorgen, a developer of motion control technologies, offers a comprehensive range of frameless servo motors, including the advanced TBM2G Series, designed specifically for space-constrained, high-performance applications.
Frameless servo motors, consisting solely of a stator and rotor, provide unique advantages in applications requiring compactness, high torque density, and design flexibility. These motors are embedded directly into the mechanical structure, enabling lighter, more efficient systems with fewer components.
Kollmorgen’s TBM2G Frameless Servo Motors
The TBM2G series features torquer-style geometry, enabling maximum torque output in a compact electromagnetic package. These motors are optimized for tightly integrated mechanical systems, delivering performance and reliability across a wide range of applications.
Key features include:
- Thermal Efficiency: TBM2G motors deliver high performance at a winding temperature of just 85°C, with the ability to sustain operation up to 155°C. This low thermal rise supports safe operation near heat-sensitive components such as bearings, gear lubricants, and feedback electronics.
- Scalable Options: Optimized for voltage buses up to 48 VDC, the TBM2G series is available in seven frame sizes (50–115 mm), each with three stack lengths (8, 13, 26 mm) and three winding options (A, C, D). This results in 63 standard configurations, accommodating a broad range of design requirements.
- Production Readiness: Kollmorgen supports fast prototyping and efficient transition to full-scale production, ensuring high consistency and short lead times across the development cycle.
When properly integrated, frameless motors such as those in the TBM2G series support compact, efficient, and thermally robust machine designs.
Understanding Frameless Motor Architecture
Traditional brushless DC servo motors typically include a housing, shaft, bearings, connectors, and an integrated feedback device. Internally, a stator with copper windings surrounds a rotor with permanent magnets, which is mounted on a shaft supported by bearings.

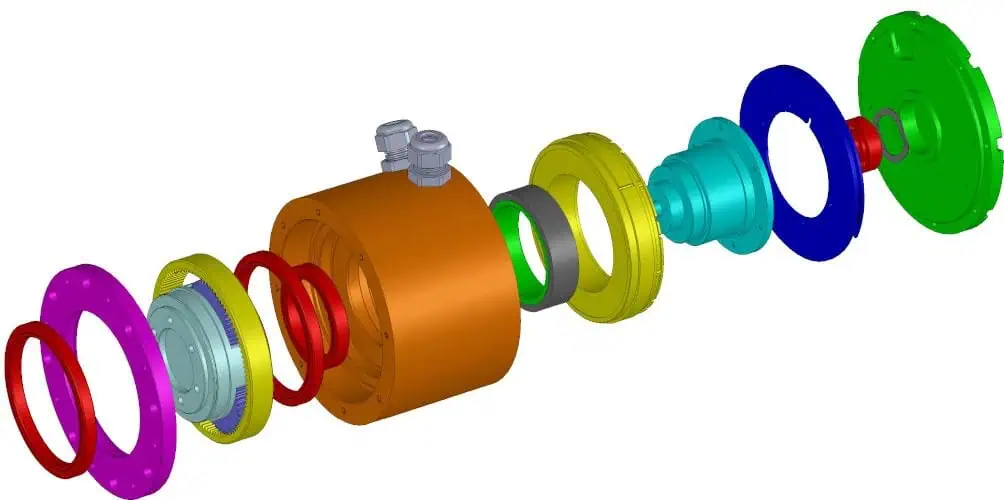
Kollmorgen TBM2G Frameless Motor.
In frameless motors, only the stator and rotor are retained. There is no housing, shaft, or bearings. This minimal design allows the motor to be embedded directly into the host machine, utilizing existing mechanical elements such as the shaft and bearings.
Why Choose Frameless?
By eliminating the housing and support components, frameless motors achieve the highest possible torque density for a given size. Their embedded integration reduces space requirements, minimizes system weight, and allows direct protection from harsh environmental conditions like washdown or submersion.
These motors are ideal for assemblies such as rotary actuators, where precision, torque, and compactness are primary design objectives.
Design Considerations for Integration
Embedding a frameless motor requires detailed mechanical and thermal planning. Key considerations include:
- Gearing: Frameless motors are often used for direct-drive systems. When additional torque is needed, gear types such as harmonic, cycloidal, spur, or planetary can be used. Harmonic gears are advantageous in compact, zero-backlash applications.
- Feedback Device: Closed-loop operation requires encoders (incremental or absolute) or resolvers, depending on the environment. Hall sensors or tracks provide commutation data for the servo drive.
- Brakes: Safety in vertical or critical-axis applications may require electromagnetic or mechanical brakes to hold position during power loss or system shutdown.
- Bearings: The rotor is mounted directly on the machine’s shaft and uses the host system’s existing bearings. The design must define mounting locations and incorporate stator support structures accordingly.
Additional Mechanical and Thermal Factors
The motor’s form factor must align with mechanical constraints, including available diameter and length. Frameless motors are typically offered in torquer designs with larger diameters and shorter axial lengths, or in servo designs with longer axial lengths. When diameter is less restrictive, torquer designs enable greater torque output through the D²L principle.
Heat dissipation is another critical factor. The stator should be housed in a material with good thermal conductivity, such as aluminum, and wall thickness in the stator area should be at least 4–6 mm. Steel is also effective, though the thermal performance of some stainless steel alloys may require validation through design review.
Thermal impact on nearby components must also be considered. For instance, even with good heatsinking, the temperature within a few centimeters of a motor running at 155°C winding temperature may still be only 15°C to 20°C lower. Components sensitive to heat should be placed accordingly, or a motor with a lower thermal profile should be selected.
Thermal sensors, such as PTC devices, can provide over-temperature protection by signaling the drive to shut down when limits are exceeded. During development, linear thermistors are useful for measuring actual thermal behavior under load. In advanced systems, sensor data can also support predictive maintenance strategies.
Lastly, manufacturability should be addressed early in the design phase. The assembly process should be efficient and repeatable for volume production. Strong magnetic forces in the rotor may require specialized tools and fixturing to ensure safe and accurate assembly. A well-planned design will account for both prototyping and full-scale manufacturing needs.