This video from Tyto Robotics, a developer of high-precision testing solutions for UAVs and drones, provides a detailed overview of motor mapping using a flight thrust stand and a Python script executed in a Google Colab notebook.
Tyto Robotics demonstrates how to convert RPM, torque, voltage, and current data into both a motor efficiency map and a motor power consumption map, predicting performance even at points not directly tested.
These maps support drone motor selection and enable more informed design decisions when optimizing for range, payload, or responsiveness. Tyto Robotics shows how to create a reliable motor model that can be referenced in future projects.
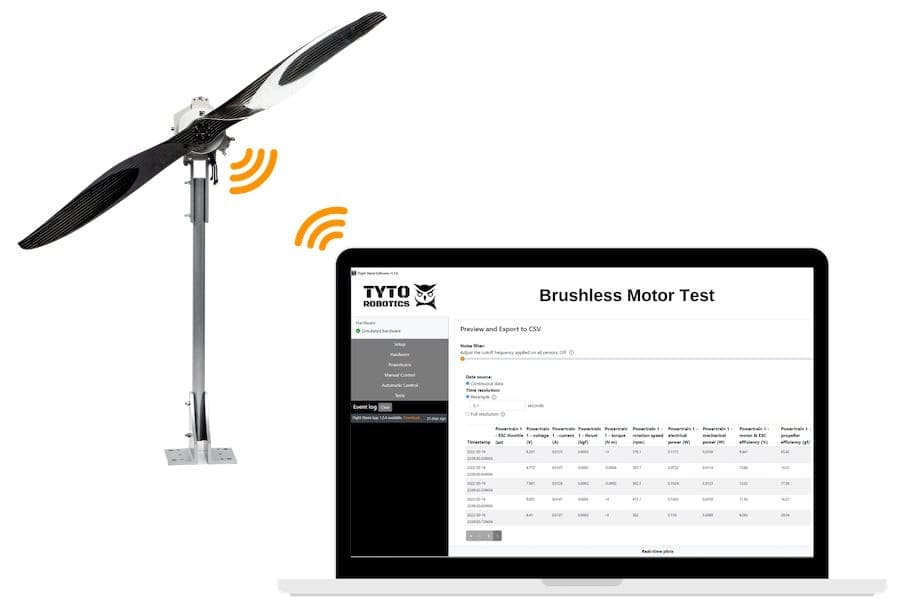
The company demonstrates the full test setup on a Flight Stand 15 thrust stand, running automated step tests across throttle increments with multiple prop sizes. The process includes exporting CSV data and using Google Colab to fit a third-order model that generates a motor power consumption map, plotting RPM against torque and coloring by power.
Tyto Robotics then derives a motor efficiency map from that model to highlight the operating regions where a motor performs most efficiently. Finally, the video shows how to repurpose the notebook with your own data to accelerate motor and propeller selection, improve endurance estimates, and de-risk design iterations.