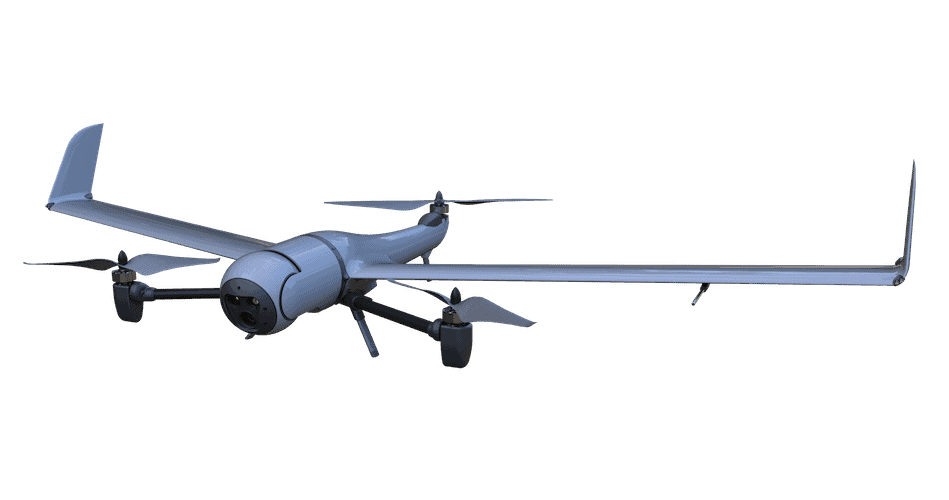
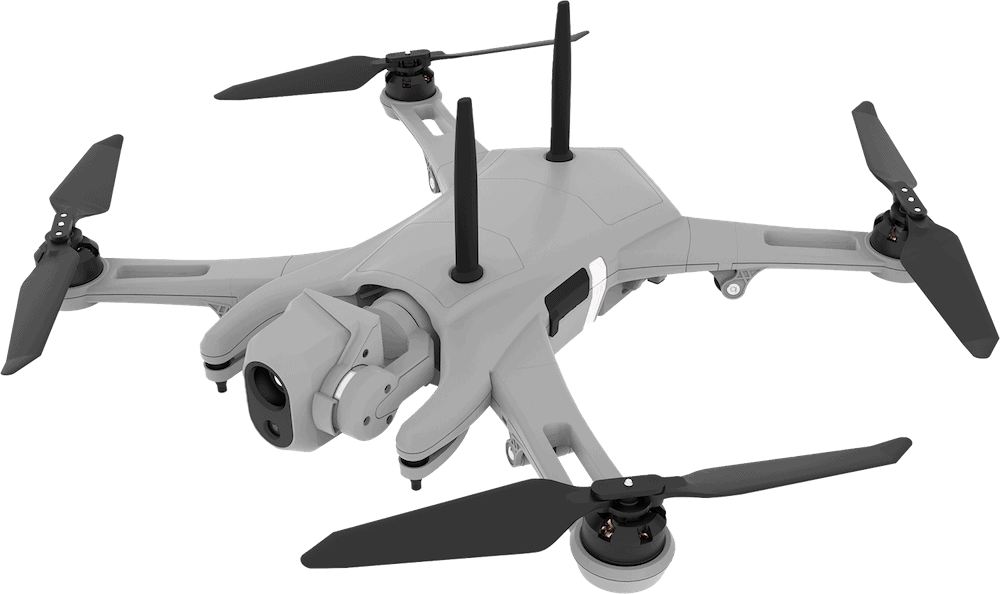
Red Cat Holdings, Inc., a U.S.-based provider of advanced all-domain drone and robotic solutions, has successfully completed flight testing of its Black Widow™ drone equipped with Palantir Technologies Inc. Visual Navigation (VNav) Software.
The validation marks the first known commercial demonstration of visual navigation software on a drone already accepted into a U.S. Army program of record.
The successful test confirmed the Black Widow drone’s capability to navigate in GPS-denied conditions using Palantir’s visual-based navigation software. The Black Widow is currently part of the U.S. Army’s Short Range Reconnaissance (SRR) program of record.
Jeff Thompson, CEO of Red Cat, commented, “This is a breakthrough moment not just for Red Cat, but for the tactical needs of the Department of War. Every battlefield is a GPS-denied environment, and this successful test shows that Red Cat and Palantir are delivering a software-driven solution the Army can rely on. It requires no new hardware, is ready to deploy today, and gives warfighters the edge in contested environments. It also signals our evolution into a full-stack defense technology platform, with expected margin expansion and strong revenue potential in 2026.”
VNav operates by utilizing edge-based sensor fusion to generate real-time position estimates. It achieves this by combining visual cues with inertial data, which enables the drone to maintain navigation in environments where GPS is denied or degraded.
Engineers from Red Cat and Palantir conducted a multi-day series of tests, evaluating VNav in both nominal and simulated GPS-denied conditions, including flights at high speeds and low altitudes.
The testing sequence validated:
- Full integration of VNav with the Black Widow™ flight controller, including its compatibility with GPS-assisted operations.
- Accurate navigation within simulated GPS-denied environments.
- Reliable operation at altitudes as low as 150 feet AGL and speeds reaching up to 16 mph.
- Robust performance under twilight and extremely low-light conditions.
- The successful completion of a simulated reconnaissance mission involving dynamic flight parameters without GPS or human input.
These results were used to define a preliminary performance envelope for VNav on the Black Widow system. The final mission demonstrated VNav’s full capability to navigate a complete ISR (Intelligence, Surveillance, and Reconnaissance) mission profile. This included cruising to a target, descending for surveillance, flying local waypoints, and returning to base, all while operating without GPS and maintaining continuous positional awareness.
Palantir engineers reported that VNav achieved a mean positional error of approximately 7 meters over a 2.7-kilometer route. Crucially, no additional hardware was required for any of the flights, as the VNav software runs entirely on the Black Widow’s existing onboard sensors.
Akash Jain, President and CTO, Palantir USG, stated, “Palantir Visual Navigation performed well in real-world conditions. This demonstrates our approach to visual navigation in disrupted environments –– delivering intelligent software that adapts, scales across platforms like Black Widow, and supports the Army’s integrated operating systems.”
The two companies are now moving toward a formal Army demonstration and the full productization of the VNav capability for all fielded Black Widow systems. This move also signals Red Cat’s evolution into a full-stack defense technology platform.