

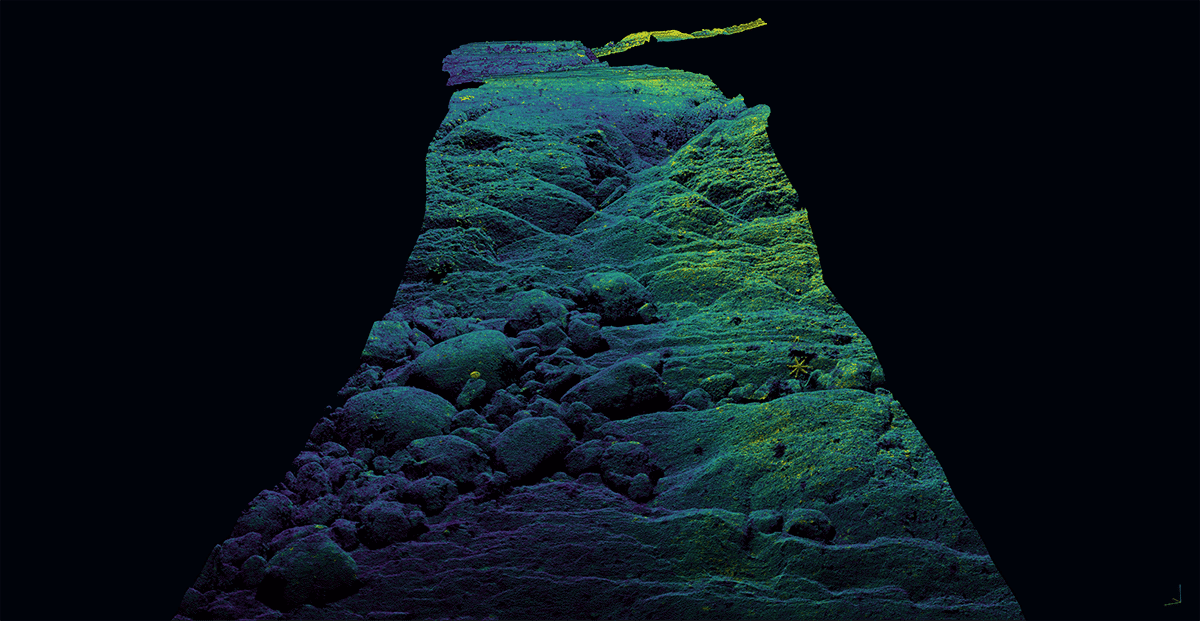
Recon LS AUV Payload is a modular optical survey payload developed for Autonomous Underwater Vehicles (AUVs) requiring integrated image mapping and dynamic laser scanning capabilities. Combining high-resolution still imagery with precise 3D laser data acquisition, the system delivers comprehensive visual awareness for subsea inspection, seabed mapping, and target assessment operations. Designed to simplify vehicle integration and accelerate operational deployment, Recon LS incorporates onboard processing, navigation integration, and data storage within a compact payload architecture suitable for long-duration autonomous missions.
Engineered for use on industry-leading AUV platforms including L3 Harris IVER 4 and HII REMUS 100, 300, and 600 vehicles, the payload utilises existing vehicle navigation data to support dynamic modelling and accurate geo-referenced 3D reconstruction. Real-time onboard processing of laser and imaging data enables rapid analysis, automation workflows, and reduced time to results, while the low-power architecture supports extended survey endurance. Integrated with ViewLS software for real-time control and processing, Recon LS provides both qualitative visual inspection and quantitative subsea measurement capabilities within a single modular system.
Specifications:
| Scan range: | 1.2 m – 7 m |
| Points per line: | 2464 |
| Field of view: | 50° |
| Laser classification: | Class 3B Laser Product |
| Laser wavelength and power: | 448 nm, <75 mW, 1 mSec to CW |
| Laser standard: | EN/IEC 60825-1 2014 |
| Imaging options: | 5 MP or 12 MP, colour or monochrome |
| Profile rate: | Laser + stills: 58 Hz Laser + 2 Hz stills |






