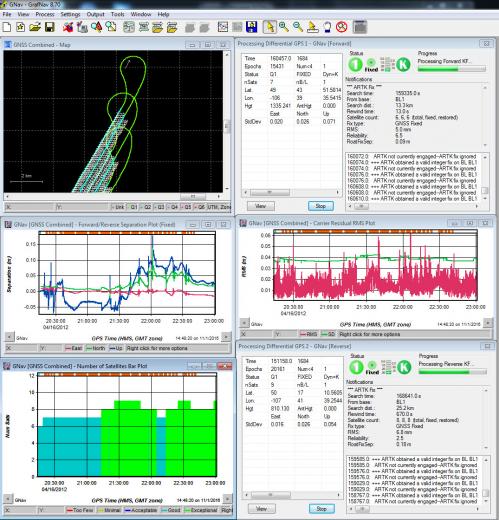
GrafNav post-processing software is a powerful, highly configurable processing engine that allows for the best possible static or kinematic GNSS accuracy using all available GNSS data. Support of data formats from most single and multi-frequency commercial receivers means GrafNav will likely work with your existing hardware. A full suite of data and solution visualization and diagnostic tools is available for quality assurance. Precise satellite clock and orbit data can be downloaded from within GrafNav to achieve sub-5 cm position accuracy using PPP with kinematic trajectories.
No matter the type of project, GrafNav can be configured to optimize your results. The software can easily make use of project specific base station data, or use publicly available reference station data to achieve centimetre-level position accuracy. GrafNav also supports multi-base processing for projects that cover large areas. A float static solution is available for long and/or noisy baselines. Built-in ionospheric processing improves accuracies for dual-frequency users.
Features- Full dual frequency GPS, GLONASS, BeiDou, Galileo and QZSS support
- Configurable support of L1+L2 (includes E5b, B2I) or L1+L5 (includes E5b, B2a) for different applications
- Support for up to 32 base stations
- Compatible with multiple receiver manufacturers for maximum flexibility
- Static and kinematic processing
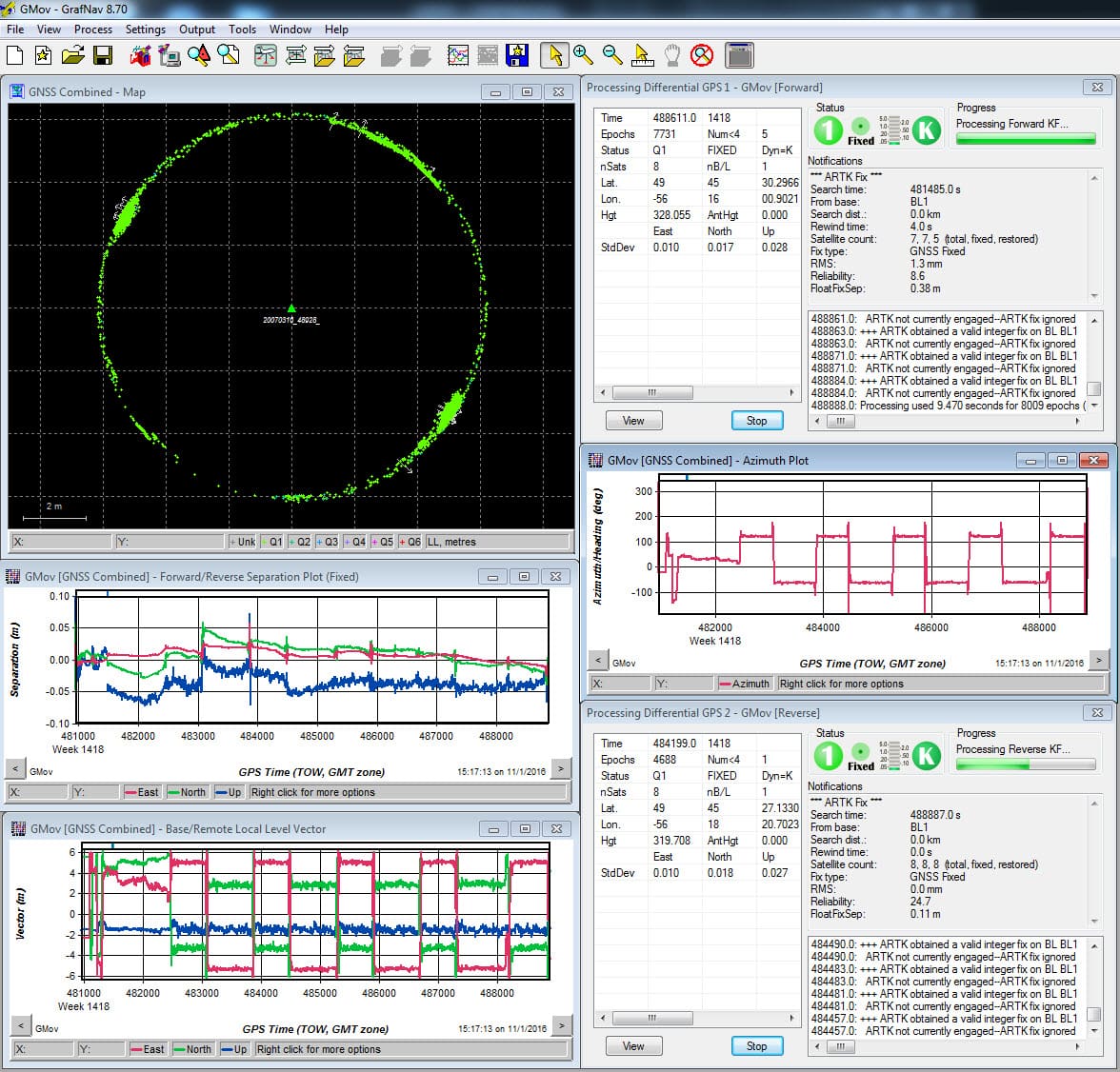
- Improved accuracy through forward and reverse processing
- Heading determination between two fixed antenna on the same moving vehicle
- Moving baseline processing: relative positioning and velocity between two kinematic antennas
- Flexbile ASCII Export Wizard included
- Direct output to Google Earth, RIEGL POF/POQ, DXF and SBET format
- Build HTML QC reports
- Differential and Precise Point Positioning (PPP) processing
- Provides best possible position accuracy, down to the centimetre level
- Streamlined Project Wizard for quick startup
- Built-in processing profiles for airborne, ground, pedestrian, UAV and marine projects
- Support for multiple base stations
- Industry standard for GNSS post-processing
GNSS technology is used to compute position and velocity for a variety of real-time applications, including vehicle navigation and tracking. The real-time accuracy of GNSS however, is limited by real-time transmission of correction data. Further, in many applications where absolute position accuracy is critical, the position information is not required in real-time. For these applications, the accuracy of the GNSS position and velocity solution can be greatly improved by post-processing.
Optimize your Workflow- Support for up to 32 base stations
- Public base station and PPP clock and orbit data download utility
- Simultaneous forward and reverse processing
- Interpolation of coordinates for station markers and camera trigger events
- Resampling, concatenation and splicing of raw GNSS data
- Full geoid support for the US, Canada, Japan, Australia, Mexico, France, UK, Ireland and more
- Choose from popular datums and map projections or customize your own